


Adapter: Worx Landroid v2.x.x
-
Moin, ich bin seit dieser Woche auch Besitzer eines landroid s. Was mich an der App stört ist, dass keine Push Nachrichten unterstützt werden. Wäre doch eigentlich ganz einfach, eine Nachricht zu schicken, wenn der Mäher außerhalb des Mähbereiches ist oder andere Fehlermeldungen anzeigt.
Lässt sich da was über ioBroker mit dem Telegram Adapter machen?
Ich würde den Roboter auch gerne visualisieren. Leider stürzen meine Tablets bei Vis immer ab, sodass ich wieder zurück zu DashUI bin. Irgendeine Chance, dort einzelne Datenpunkte anzeigen Oder den Roboter per virtuellen Schalter zu starten/Ladestation zu schicken?
Gruß
Gesendet von meinem ONEPLUS A3003 mit Tapatalk ` Eine Nachricht senden ist kein Problem egal ob Telegram oder pusbover oder Email oder ifttt oder ein Anruf bei nem DECT Telefon aus der
FRITZ Box. Was für ein tab nutzt du denn? Bei mir läuft es auch au einem 6 Jahre alten gigaset. Da sehe ich aber ich noch das Problem
Gesendet von meinem Handy
-
Hab iPads der 1. Generation im Einsatz.
Wie macht man das mit den Nachrichten? Ich nutze in HM bisher Pushover…
Gesendet von meinem ONEPLUS A3003 mit Tapatalk ` Pushover Adapter installieren und dann über ei Javascript die Bedingungen festlegen am bestem mal im forum suchen
Gesendet von meinem Handy
-
Hab iPads der 1. Generation im Einsatz.
Wie macht man das mit den Nachrichten? Ich nutze in HM bisher Pushover…
Gesendet von meinem ONEPLUS A3003 mit Tapatalk ` Pushover Adapter installieren und dann über ei Javascript die Bedingungen festlegen am bestem mal im forum suchen
Gesendet von meinem Handy ` Ooooojeeee, Java was??? Hahaha, ich spiel heute Abend mal rum…. Wird vmtl nicht sehr erfolgreich enden....
Gesendet von meinem ONEPLUS A3003 mit Tapatalk
-
Hab iPads der 1. Generation im Einsatz.
Wie macht man das mit den Nachrichten? Ich nutze in HM bisher Pushover…
Gesendet von meinem ONEPLUS A3003 mit Tapatalk ` Pushover Adapter installieren und dann über ei Javascript die Bedingungen festlegen am bestem mal im forum suchen
Gesendet von meinem Handy ` Ooooojeeee, Java was??? Hahaha, ich spiel heute Abend mal rum…. Wird vmtl nicht sehr erfolgreich enden....
Gesendet von meinem ONEPLUS A3003 mit Tapatalk ` Such einfach mal nach pushover im forum, da gibt es gute Anleitungen
Gesendet von meinem Handy
-
Hab iPads der 1. Generation im Einsatz.
Wie macht man das mit den Nachrichten? Ich nutze in HM bisher Pushover…
Gesendet von meinem ONEPLUS A3003 mit Tapatalk `
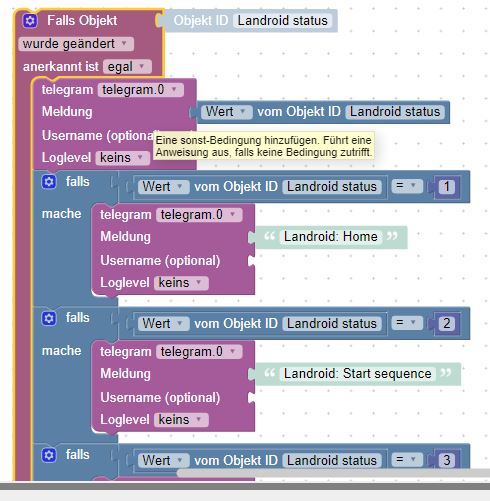
Hiermit kommt der status über telegram… einfach pushover stattdessen wählen:
Blockly-Code:! <block 1999/xmlns="<URL url=" http:/www.w3.org/xhtml"="">http://www.w3.org/1999/xhtml" type="on_ext" id="g7^HA^{{OtxUsJ.Ii4}x" x="-637" y="-262">
! <mutation items="1"></mutation>
! <field name="CONDITION">ne</field>
! <value name="OID0"><shadow type="field_oid" id="mKVSa=7SRIX5!]Q0;2|,"><field name="oid">landroid-s.0.mower.status</field></shadow></value>
! <statement name="STATEMENT"><block type="telegram" id="n#{B!OSSy8;Mlrril6sO"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="9_qINK2Lc02NNKPw@aer"><field name="TEXT">text</field></shadow>
! <block type="get_value" id="F8ALf2kl:5!+?+z.1cd!"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <next><block type="controls_if" id="f1fhu3zZsV9Z]5k,iwl!"><value name="IF0"><block type="logic_compare" id="){tKfsVk-)D~5FD_Ik8."><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="Rp/+uRkKS:Q)SHuhI;sP"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="B?M%|EhjQ:/[:tOqSx:t"><field name="NUM">1</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="ozxyVc^I%mhWkEGZ@t+q"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="Jh.@f+:~=W)i@eDUJ{GE"><field name="TEXT">Landroid: Home</field></shadow></value></block></statement>
! <next><block type="controls_if" id="}YDC{d=jSJJ_1tfvt5;c"><value name="IF0"><block type="logic_compare" id="%g{kt*,spi:.rd_i!M/a"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="jxD%D81N9)uSVFlpF~Zr"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="o.pxpGE2zp3ns|.u]VrM"><field name="NUM">2</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="h|LRzLrjplnf?z=N)9J5"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="+q2dxi^6Ep_Y%a,:+wzr"><field name="TEXT">Landroid: Start sequence</field></shadow></value></block></statement>
! <next><block type="controls_if" id="u]Z4:us]hEml=P%19MDy"><value name="IF0"><block type="logic_compare" id="Xw3,ZIE[)C[7@z775nk="><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="v=zd[,pC`)C4`m|@{5=["><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="Bmfq+CeXm7qO;iFFd@?r"><field name="NUM">3</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="h|jlrlNEa=poLk}RW8bA"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="H:dAIx7()dmuF`ttM%8K"><field name="TEXT">Landroid: Leaving Home</field></shadow></value></block></statement>
! <next><block type="controls_if" id="/uOdEs!?g:DvEqxr1zYU"><value name="IF0"><block type="logic_compare" id="uK)p@Pu?hyInyAhvEKM"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="jtV;.ZH+(M!+5o]Qhvz`"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="G@nbWv+QgTe9ZQ5Pul%Z"><field name="NUM">4</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="#,U(OtTr.eTA/qIigIYX"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="8j?n%HRXgDwtf%]6Z[Wa"><field name="TEXT">Landroid: Follow wire</field></shadow></value></block></statement>
! <next><block type="controls_if" id="B_MGO8C;vwoDkAi-e3g~"><value name="IF0"><block type="logic_compare" id="T9YBa/Li?PzZyI}P:@Ya"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="XxdZlh@(w+v+,yH`gm-9"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="neYh~0ci{XaNP9#D+9q,"><field name="NUM">5</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="Yn?`u^~cC4V@MPHR7Dx-"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="f`GtCqqe+LNIR#Yv:.|w"><field name="TEXT">Landroid: Searching Home</field></shadow></value></block></statement>
! <next><block type="controls_if" id="~oEPo|Nn~Ef,pY/c;}bP"><value name="IF0"><block type="logic_compare" id="IQp6A;r_`)@LH2[c~e]?"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="/w^]0]scOD+PE=`HX8x0"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="pPRn~h9_zmn/xe7(0)a"><field name="NUM">6</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="=!-)4ZIP#S(%u@p!G!D"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="w^TcPhUBG%e:yEs1,QG{"><field name="TEXT">Landroid: Searching home</field></shadow></value></block></statement>
! <next><block type="controls_if" id="Lj(k!P.tHzPbIq?v3TML"><value name="IF0"><block type="logic_compare" id="4L%ySbE8m0~0J=`wiv~1"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="nSYTJQ,y0uv`#_FCu`r"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="tK@tIL`D~t11s=m@i87D"><field name="NUM">7</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="eM+~I(H,iv%HL,qi7S-R"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="eU@?0Q]9j@Do-9;km=a3"><field name="TEXT">Landroid: am Mähen</field></shadow></value></block></statement>
! <next><block type="controls_if" id="~f135e/tgM`,b6dpRX2t"><value name="IF0"><block type="logic_compare" id="iX}.;UAF}|Q6+{SJ^(Y9"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="Yi507Sd(^TTb==,;2ZLX"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="so|!DdK4S@@peq{+:0`"><field name="NUM">8</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="8IONHLY9h][wZouY;/^l"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="A#cx@-r6jU5bS2[-nQ2^"><field name="TEXT">Landroid: Lifted</field></shadow></value></block></statement>
! <next><block type="controls_if" id="p.m`_xSQrN9tw+Gim3qc"><value name="IF0"><block type="logic_compare" id="q(b3.;{Zj;]D49M0F?r"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="Jj55a-,tI:GX{!H8?Vxm"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="Bx#Kne:=(`~-],PnZLt8"><field name="NUM">9</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="5wSgh[|h@x@6iJf9ZK"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="p;Y(+pxbw2.EAD@(j{/"><field name="TEXT">Landroid: Trapped</field></shadow></value></block></statement>
! <next><block type="controls_if" id="%w^mWx;Ah~52YIW9.z4L"><value name="IF0"><block type="logic_compare" id="%.]DXUIHcqp+WvzrDqhw"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="rI(3y|R`%ANKp7qO~1`"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="rFM}4u~{gMQ0sL=/SYup"><field name="NUM">10</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="rW#7oo[gIf:LZ,1Iyx^I"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="L/7UoJ/LTr7b2:SDpx2P"><field name="TEXT">Landroid: trapped</field></shadow></value></block></statement>
! <next><block type="controls_if" id="+e?X`%7iM=%w*.mS)hF)"><value name="IF0"><block type="logic_compare" id="pQ3XNDDdU:x3Ml#J~MMm"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="sJT)RMCquKFNGH=f=5WK"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="CN@ScB5FoIe~WUTz4|N1"><field name="NUM">11</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="T52V#Mx|VPw@-smV=4Y0"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="!{D{T3IvRM)JSqYV~JMO"><field name="TEXT">Landroid: Debug</field></shadow></value></block></statement>
! <next><block type="controls_if" id="y%tm1K5~Q6b.1nE4pA!,"><value name="IF0"><block type="logic_compare" id=",d}K!hLzEk|Xxrcb;xIz"><field name="OP">EQ</field>
! <value name="A"><block type="get_value" id="#DS,XD`EWD9k.@!?(bj/"><field name="ATTR">val</field>
! <field name="OID">landroid-s.0.mower.status</field></block></value>
! <value name="B"><block type="math_number" id="uy]x{~I.:/KWh/d*sF,D"><field name="NUM">12</field></block></value></block></value>
! <statement name="DO0"><block type="telegram" id="1~b8PRPwDFPRF4QeFY=)"><field name="INSTANCE">.0</field>
! <value name="MESSAGE"><shadow type="text" id="5F^[?M:~:R6R2=;0PYwc"><field name="TEXT">Landroid: Remote control</field></shadow></value></block></statement></block></next></block></next></block></next></block></next></block></next></block></next></block></next></block></next></block></next></block></next></block></next></block></next></block></statement></block> -
Moin lobomau, vielen Dank für dein Script. Ich kriege den Nachbau aber nicht hin. Kann ich den Code irgendwie Kopieren und einfügen?
Gesendet von meinem ONEPLUS A3003 mit Tapatalk `
Selbstverständlich. deswegen habe ich den Code ja mitgegeben. Musst auf Spoiler: Show hidden text klicken.Dann den Text kopieren und bei Blocky auf importieren klicken und Text einsetzen. Hinterher händisch anpassen und pushover gegen telegram austauschen.
-
Hallo,
ich lasse mir im Augenblick mit dem folgenden Script Fehlermeldungen von meinem "Otto" aufs Handi schicken.
! //Programm wertet den Status des Objektes "landroid-s.0.mower.error" aus und sendet entsprechende Pushover-Mitteilung
! on("landroid-s.0.mower.error", function(obj)
! {
! var activity = getState("landroid-s.0.mower.error").val;
! switch(activity) {
! case 0: sendTo('console.log(activity)');
! break;
! case 1: sendTo('pushover.1', 'Otto ist in einer Falle!');
! break;
! case 2: sendTo('pushover.1', 'Otto wurde angehoben');
! break;
! case 3: sendTo('pushover.1', 'Otto findet den Draht nicht');
! break;
! case 4: sendTo('pushover.1', {message: 'Otto ist außerhalb des Drahtes', sound: 'spacealarm', priority: 1});
! break;
! case 5: sendTo('pushover.1', 'Otto ist nass geworden');
! break;
! case 6: sendTo('pushover.1', 'close door to mow');
! break;
! case 7: sendTo('pushover.1', 'close door to go home');
! break;
! case 8: sendTo('pushover.1', {message:'Achtung! Schneidwerk blockiert', sound: 'spacealarm', priority: 1});
! break;
! case 9: sendTo('pushover.1', 'Achtung! Radmotor blockiert');
! break;
! case 10: sendTo('pushover.1', 'Trapped Timeout');
! break;
! case 11: sendTo('pushover.1', 'Otto liegt auf dem Rücken');
! break;
! case 12: sendTo('pushover.1', 'Batterie zu schwach');
! break;
! case 13: sendTo('pushover.1', 'Polung des Drahtes vertauscht');
! break;
! case 14: sendTo('pushover.1', 'Ladefehler');
! break;
! case 15: sendTo('pushover.1', 'Polung des Drahtes vertauscht');
! break;
! default: sendTo('pushover.1', 'Achtung! Irgendwas ist mit Otto nicht in Ordnung');
! break;
! }
! });Habe gleichzeitig noch ein entsprechendes Script für die Statusmeldungen laufen. Da ich eigentlich nicht für jeden Pups eine Pushover erhalten möchte, muss ich mal sehen, wie ich das eindampfe. Letzten Endes brauche ich nur dann eine Benachrichtigung, wenn ich eingreifen muss. Außerdem möchte ich am Ende einen Alarm auslösen, wenn mein Otto nachts mal "gelifted" wird.
Gruß
Strizz
-
-
Hallo Stoni,
ich gehe davon aus, dass du den Javascript-Adapter installiert hast. Dann gehe auf den Reiter Skripte im ioBroker-admin und lege im Verzeichnis 'common' ein neues Skript an. Als Enginetyp (Dropdown-Menü oben rechts) musst du natürlich Javascript angeben. Dann den Inhalt des Spoilers (ohne die Zeile erste Zeile 'Spoiler: Hide') dort einfügen. Gerade noch mal getestet. Müsste funktionieren.
Gruß
Strizz
-
Hat jemand vor, der einen S besitzt seine FW auf 2.72 zu updaten? Wäre super wenn dies jemand machen könnte und berichtet ob noch alles läuft `
unter worxlandroid.com/de wird mir noch 2.59 als aktuelle Version angezeigt. Gibt es einen change log? -
Hat jemand vor, der einen S besitzt seine FW auf 2.72 zu updaten? Wäre super wenn dies jemand machen könnte und berichtet ob noch alles läuft ` Schau doch mal im Roboter-Forum, da sind schon einige, die es ausprobieren…
Gesendet von meinem ONEPLUS A3003 mit Tapatalk
-
Da ich tierisch Probleme mit der 2.59 habe, würde ich testen. Kann hier jemand mal die 2.72 anhängen? Bin leider nicht im Roboter-Forum.
Grüße,
Stefan
Gesendet von iPhone mit Tapatalk
-
Da ich tierisch Probleme mit der 2.59 habe, würde ich testen. Kann hier jemand mal die 2.72 anhängen? Bin leider nicht im Roboter-Forum.
Grüße,
Stefan
Gesendet von iPhone mit Tapatalk ` Welche Probleme?
Hier findest Du alle Firmware:
-
Danke.
Seit der 2.59 wurde vermeintlich eine Funktion hinzugefügt, damit sich der Mäher befreien kann. Bei mir im Garten ist ein Teich. Wenn der Mäher sich vermeintlich meint befreien zu müssen, fährt er rückwärts und überfährt dabei den Draht. So musste ich ihn schon einmal aus dem Teich ziehen und zweimal konnte ich das gerade noch so verhindern. Er steht beim nach Hause fahren öfters an Kurven. Dort wurde der Draht in 45 Grad Winkeln verlegt, damit er besser rum kommt. Des Weiteren fährt er sich an Stellen fest, an denen er mit der 2.50 nicht gestanden hat. Ich würde mir gern die 2.50 zurückwünschen, doch leider gibt es ja dann gleich wieder das AutoUpdate. Internet kappen, ist keine Lösung.
Grüße,
Stefan
EDIT:
Heute kam ich nach Hause und der Mäher stand am Rand. Die Kinder hatten mir erzählt, dass sie ihn aus dem Teich gezogen haben. Also schon wieder. Und das an einer Stelle, an der keine Kurve, Ecke, oder Kante an der sich stören könnte.
Das rechte Antriebsrad lässt sich sehr schwer bewegen. Selbst fährt er nicht mehr. Akku leuchtet rot. Wasser konnte über den Tag rauslaufen. Ich lade ihn gerade auf. Hoffentlich geht er noch. Mit der 2.50 kein Problem gehabt.
EDIT2: Antriebsmotor Fehler
Das Mähwerk läuft an, dann geht er sofort auf den Fehler. Elektronik funktioniert. Die 2.50 drauf gemacht, dann versucht er loszufahren und fährt nur rückwärts im Kreis. Ein Rad dreht sich garnicht. Akku habe ich schon für ein paar Minuten rausgenommen.
Jemand einen Tipp? Gehört hier zwar gerade nicht her, hoffe trotzdem auf eine Hilfestellung.
Gesendet von iPhone mit Tapatalk
-
Danke.
Seit der 2.59 wurde vermeintlich eine Funktion hinzugefügt, damit sich der Mäher befreien kann. Bei mir im Garten ist ein Teich. Wenn der Mäher sich vermeintlich meint befreien zu müssen, fährt er rückwärts und überfährt dabei den Draht. So musste ich ihn schon einmal aus dem Teich ziehen und zweimal konnte ich das gerade noch so verhindern. Er steht beim nach Hause fahren öfters an Kurven. Dort wurde der Draht in 45 Grad Winkeln verlegt, damit er besser rum kommt. Des Weiteren fährt er sich an Stellen fest, an denen er mit der 2.50 nicht gestanden hat. Ich würde mir gern die 2.50 zurückwünschen, doch leider gibt es ja dann gleich wieder das AutoUpdate. Internet kappen, ist keine Lösung.
Grüße,
Stefan
EDIT:
Heute kam ich nach Hause und der Mäher stand am Rand. Die Kinder hatten mir erzählt, dass sie ihn aus dem Teich gezogen haben. Also schon wieder. Und das an einer Stelle, an der keine Kurve, Ecke, oder Kante an der sich stören könnte.
Das rechte Antriebsrad lässt sich sehr schwer bewegen. Selbst fährt er nicht mehr. Akku leuchtet rot. Wasser konnte über den Tag rauslaufen. Ich lade ihn gerade auf. Hoffentlich geht er noch. Mit der 2.50 kein Problem gehabt.
EDIT2: Antriebsmotor Fehler
Das Mähwerk läuft an, dann geht er sofort auf den Fehler. Elektronik funktioniert. Die 2.50 drauf gemacht, dann versucht er loszufahren und fährt nur rückwärts im Kreis. Ein Rad dreht sich garnicht. Akku habe ich schon für ein paar Minuten rausgenommen.
Jemand einen Tipp? Gehört hier zwar gerade nicht her, hoffe trotzdem auf eine Hilfestellung.
Gesendet von iPhone mit Tapatalk ` Gib ihn zur Reparatur, hast doch sicher noch Garantie…
Gesendet von meinem ONEPLUS A3003 mit Tapatalk
-
Hab ich jetzt gemacht. Wird morgen abgeholt. Ob es Garantie ist? Ich werd es sehen. Hab das Problem mit der Firmware in der Problembeschreibung geschildert.
Gesendet von iPhone mit Tapatalk
Support us
511
Online32.7k
Users82.5k
Topics1.3m
Posts