NEWS



Скрипт для счётчика
-
Убейте меня!!! ОН НЕ РАБОТАЕТ….. Ну не пингуется этот ip, я поменял на свои......
-
Убейте меня!!! ОН НЕ РАБОТАЕТ….. Ну не пингуется этот ip, я поменял на свои...... `
библиотеки последних версии? -
Начнем с простого…. Какая IDE
-
в IDE 1.5.2 гружу вот этот скетч:
! ````
/*
Web ServerA simple web server that shows the value of the analog input pins.
using an Arduino Wiznet Ethernet shield.Circuit:
- Ethernet shield attached to pins 10, 11, 12, 13
- Analog inputs attached to pins A0 through A5 (optional)
created 18 Dec 2009
by David A. Mellis
modified 9 Apr 2012
by Tom Igoe*/
! #include <spi.h>#include <ethernet.h>// Enter a MAC address and IP address for your controller below.
// The IP address will be dependent on your local network:
byte mac[] = {
0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
IPAddress ip(192,168,0, 89);
! // Initialize the Ethernet server library
// with the IP address and port you want to use
// (port 80 is default for HTTP):
EthernetServer server(80);
! void setup() {
// Open serial communications and wait for port to open:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for Leonardo only
}
! // start the Ethernet connection and the server:
Ethernet.begin(mac, ip);
server.begin();
Serial.print("server is at ");
Serial.println(Ethernet.localIP());
}
! void loop() {
// listen for incoming clients
EthernetClient client = server.available();
if (client) {
Serial.println("new client");
// an http request ends with a blank line
boolean currentLineIsBlank = true;
while (client.connected()) {
if (client.available()) {
char c = client.read();
Serial.write(c);
// if you've gotten to the end of the line (received a newline
// character) and the line is blank, the http request has ended,
// so you can send a reply
if (c == '\n' && currentLineIsBlank) {
// send a standard http response header
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("Connection: close");
client.println();
client.println("");
client.println("");
// add a meta refresh tag, so the browser pulls again every 5 seconds:
client.println("");
// output the value of each analog input pin
for (int analogChannel = 0; analogChannel < 6; analogChannel++) {
int sensorReading = analogRead(analogChannel);
client.print("analog input ");
client.print(analogChannel);
client.print(" is ");
client.print(sensorReading);
client.println("
");
}
client.println("");
break;
}
if (c == '\n') {
// you're starting a new line
currentLineIsBlank = true;
}
else if (c != '\r') {
// you've gotten a character on the current line
currentLineIsBlank = false;
}
}
}
// give the web browser time to receive the data
delay(1);
// close the connection:
client.stop();
Serial.println("client disonnected");
}
}</ethernet.h></spi.h>Пинг - отличный, и веб пускает, -
в 1ю8ю2 - тоже проблем нет…...
-
1ю6ю13 - полет нормальный
и 1.0.6 - работает…...
-
IDE 1.6.13 этот скетч - работает, все пингуется и данные идут
! ```
`#include <spi.h> // Ethernet shield
#include <ethernet.h> // Ethernet shield
#include <pubsubclient.h> // MQTT
#include <servo.h>
#include <dht.h>
#include <onewire.h>
#include <dallastemperature.h>
Servo servo;
! byte mac[] = { 0xC1, 0x7C, 0x38, 0x41, 0x89, 0x35 };
byte server[] = { 192, 168, 0, 11 }; //IP Брокера
byte ip[] = { 192, 168, 0, 89 }; //IP Клиента (Arduino)
! ////////////////////////////////////////////////////////////////////////////
void callback(char* topic, byte* payload, unsigned int length) {
payload[length] = '\0';
// Serial.print(topic);
// Serial.print("=");
String strTopic = String(topic);
String strPayload = String((char*)payload);
// Serial.println(strPayload);
callback_iobroker(strTopic, strPayload);
}
! EthernetClient ethClient;
PubSubClient client(server, 1883, callback, ethClient);
#define id_connect "myhome-temp"
#define id_connect "myhome-status"
#define Prefix_subscribe "myhome/Temp/"
#define Prefix_subscribe "myhome/Status/"
! ///////////////Объявляем порты ввода-вывода
#define ServoPin 3 //Порт к которому подключен сервопривод
! const int start_DI_pin []= {2, 4, 5}; // Порты Ввода
int n_DI_pin = sizeof(start_DI_pin) / sizeof(start_DI_pin[0])-1; //Вычисляем длинну массива
! const int start_DO_pin []= {6, 7}; //Порты Вывода
int n_DO_pin = sizeof(start_DO_pin) / sizeof(start_DO_pin[0])-1; //Вычисляем длинну массива
! int DI[] = {0, 0, 0};
int old_DI[] = {0, 0, 0};
! ///////////////////////////Переменные для работы с освещением//////////////////////////////////////
int ServoAngle = 100; //Угол сервопривода при включении
int flag = 0;
int flag2 = 0;
int pause = 0;
! //------------------------------------------- Sensors -------------------------------------------//
const int MQ7_Pin = A0; // Куда подключили MQ7
//int MQ7Value = 0;
int MQ7Value = analogRead(MQ7_Pin);const int foto_Pin = A1; // устанавливаем входную ногу для Фоторезистора
//unsigned int fotoValue = 0; // цифровое значение фоторезистора
unsigned int fotoValue = analogRead(foto_Pin);! #define ONE_WIRE_BUS 8
//#define TEMPERATURE_PRECISION 9
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature DS_sensors(&oneWire);
// 28 80 E9 3A 04 00 00 10
//T0:28 88 AD D7 02 00 00 42
//T1:28 14 A5 D7 02 00 00 B0
//T2:28 72 26 7B 04 00 00 2E
//T3:28 CA 1A 3B 04 00 00 CD
//T4:28 E6 D5 D7 02 00 00 C1
//T5:28 16 B4 7A 04 00 00 8A
//T6:28 2B 86 D7 02 00 00 CF
//T7:28 AB 9D D7 02 00 00 29
DeviceAddress addr_T1 = { 0x28, 0x80, 0xE9, 0x3A, 0x4, 0x0, 0x0, 0x10 };//кладовка
DeviceAddress addr_T2 = { 0x28, 0x88, 0xAD, 0xD7, 0x2, 0x0, 0x0, 0x42 };//кухня
DeviceAddress addr_T3 = { 0x28, 0x14, 0xA5, 0xD7, 0x2, 0x0, 0x0, 0xB0 };//детская
DeviceAddress addr_T4 = { 0x28, 0x72, 0x26, 0x7B, 0x4, 0x0, 0x0, 0x2E };//гараж
DeviceAddress addr_T5 = { 0x28, 0xCA, 0x1A, 0x3B, 0x4, 0x0, 0x0, 0xCD };//ванная
DeviceAddress addr_T6 = { 0x28, 0xE6, 0xD5, 0xD7, 0x2, 0x0, 0x0, 0xC1 };//улица
DeviceAddress addr_T7 = { 0x28, 0x16, 0xB4, 0x7A, 0x4, 0x0, 0x0, 0x8A };//спальня2
DeviceAddress addr_T8 = { 0x28, 0x2B, 0x86, 0xD7, 0x2, 0x0, 0x0, 0xCF };//зал
DeviceAddress addr_T9 = { 0x28, 0xAB, 0x9D, 0xD7, 0x2, 0x0, 0x0, 0x29 };//мансарда
! float T1=0;
float T2=0;
float T3=0;
float T4=0;
float T5=0;
float T6=0;
float T7=0;
float T8=0;
float T9=0;
! //dht DHT;
//#define DHT22_PIN 9
//float Hout = 0;
//float Tout = 0;
! ////////////////////////////////////////////////////////////////////////////
//void callback(char* topic, byte* payload, unsigned int length) {
// payload[length] = '\0';
// Serial.print(topic);
// Serial.print("=");
// String strTopic = String(topic);
// String strPayload = String((char*)payload);
// Serial.println(strPayload);
// callback_iobroker(strTopic, strPayload);
//}
////////////////////////////////////////////////////////////////////////////
void setup() {
Serial.begin(57600);
Serial.println("start");Serial.print("Locating devices...");
DS_sensors.begin();
Serial.print("Found ");
Serial.print(DS_sensors.getDeviceCount(), DEC);
Serial.println(" devices.");! // report parasite power requirements
Serial.print("Parasite power is: ");
if (DS_sensors.isParasitePowerMode()) Serial.println("ON");
else Serial.println("OFF");//Объявляем порты Digital inputs/outputsfor(int i=0 ;i<=n_DI_pin; i++) { pinMode (start_DI_pin [i], INPUT); }
digitalWrite(5, HIGH); //Насос скважины
digitalWrite(4, HIGH); //Электрика
for(int i=0 ;i<=n_DO_pin; i++) { pinMode (start_DO_pin [i], OUTPUT); }! Ethernet.begin(mac, ip);
if (client.connect(id_connect)) {
getSensors();
control();
//client.publish("myhome/Kitchen/Change_Counter", "0");
//client.publish("myhome/Kitchen/Temp_room", "0");
//client.publish("myhome/Kitchen/Humidity_room", "0");
client.publish("myhome/Temp/Kladovka", "0");
client.publish("myhome/Temp/Kitchen", "0");
client.publish("myhome/Temp/Detskaya", "0");
client.publish("myhome/Temp/Garage", "0");
client.publish("myhome/Temp/Street", "0");
client.publish("myhome/Temp/Spalnya2", "0");
client.publish("myhome/Temp/Zal", "0");
client.publish("myhome/Temp/Mansarda", "0");
client.publish("myhome/Temp/Vannaya", "0");//client.publish("myhome/Kitchen/Lux", "0"); //client.publish("myhome/Kitchen/Servo", "0"); client.publish("myhome/Temp/MQ7", "0"); client.publish("myhome/Status/Power", "0"); client.publish("myhome/Status/Pompe", "0"); client.subscribe("myhome/Temp/#"); client.subscribe("myhome/Status/#");}
}
/////////////////////////////////////////////////////////////////////////
void loop() {
client.loop();
control();
getSensors();
if (!client.connected()) {
if (client.connect(id_connect)) {
control();
getSensors();
client.subscribe("myhome/Temp/#");
}
}
}</dallastemperature.h></onewire.h></dht.h></servo.h></pubsubclient.h></ethernet.h></spi.h>`! А заливаем этот - и ни чего....
! >![spoiler]`[code]#include <spi.h>
#include <ethernet.h>
#include <pubsubclient.h>
#include <eeprom.h>
//#include <avr wdt.h="">
! #define PWR_CTRL A2 //Контроль напряжения
#define LED 9 //Светодиод
#define CHK_ADR 100
#define CNT_ADR 10
#define PWR_ADR 20
#define POLL_ADR 30
#define RATIO_ADR 40
! const char* topic_err = "myhome/test/error";
const char* topic_cnt = "myhome/test/count";
const char* topic_pwr = "myhome/test/power";
const char* topic_amp = "myhome/test/amp";
const char* topic_save = "myhome/test/save";
const char* topic_correction = "myhome/test/correction";
const char* topic_connection = "myhome/test/connection";
const char* topic_ip = "myhome/test/config/ip";
const char* topic_polling = "myhome/test/config/polling";
const char* topic_bounce = "myhome/test/config/bounce";
const char* topic_num = "myhome/test/config/num";
const char* topic_reset = "myhome/test/config/reset";
const char* topic_raw = "myhome/test/RAW";
const char* subscr = "myhome/test/#";
! byte mac[] = { 0xDE, 0xA3, 0xBE, 0xE4, 0xDE, 0x35 };
byte ip[] = { 192, 168, 0, 89};
byte server[] = { 192, 168, 0, 15};
! unsigned long cnt = 0;
unsigned long prev_cnt = 2;
unsigned long pwr = 0;
unsigned long prev_pwr = 2;
int amp = 0;
int prev_amp = 2;
int num = 0;
int prev_num;
int bounce = 10;
int prev_bounce;
int chk = 0;
int chk_S = 0;
unsigned long prevMillis = 0;
unsigned long prevMillis_cnt = 0;
int poll = 5000;
bool error = 0;
String cmd = "";
bool strComplete = false;
char buf [50];
char buffer[100];
char s[16];
! ////////////////////////////////////////////////////////////////////////////
void callback(char* topic, byte* payload, unsigned int length) {
payload[length] = '\0';
String strTopic = String(topic);
String strPayload = String((char*)payload);
callback_iobroker(strTopic, strPayload);
}
! EthernetClient ethClient;
PubSubClient client(ethClient);
! void setup() {
Serial.begin(57600);
//MCUSR = 0;
// wdt_disable();
Serial.println("WDT_disable");
cmd.reserve(100);
delay(10000);Serial.println("Starting......");
! if (EEPROM.read(1) != 99) { //Если первый запуск
EEPROM.write(1, 99);
for (int i = 0 ; i < 4; i++) {
EEPROM.write(110 + i, ip[i]);
}
for (int i = 0 ; i < 4; i++) {
EEPROM.write(120 + i, server[i]);
}
} else {
chk = EEPROMReadInt(CHK_ADR);
cnt = EEPROMReadLong(CNT_ADR);
poll = EEPROMReadInt(POLL_ADR);
chk_S = poll - 500;
if (chk != chk_S) {
error = 2;
}
for (int i = 0; i < 4; i++) {
ip[i] = EEPROM.read(110 + i);
}
for (int i = 0; i < 4; i++) {
server[i] = EEPROM.read(120 + i);
}
}
! pinMode(LED, OUTPUT);
! client.setServer(server, 1883);
client.setCallback(callback);
Ethernet.begin(mac, ip);delay(200);
//wdt_enable(WDTO_8S);
Serial.println("WDTO_8S");
if (client.connect("test")){
digitalWrite(LED, LOW);
Public();
}
}! void serialEvent() {
while (Serial.available() > 0) {
char inChar = (char)Serial.read();
cmd += inChar;
if (inChar == '\n') {
strComplete = true;
}
}
}
! void loop() {
// wdt_reset();
Serial.println("WDT_reset");
client.loop();
if (!client.connected()) {
reconnect();
}
! /if (analogRead(PWR_CTRL) < 1000) {
digitalWrite(LED, LOW);
save();
delay(10000);
}/
! if (strComplete) {
digitalWrite(LED, !digitalRead(LED));
cmd.toCharArray(buffer, 100);
cnt = atoi(strtok(buffer, ";"));
pwr = atoi(strtok(NULL, ";"));
amp = atoi(strtok(NULL, ";"));
bounce = atoi(strtok(NULL, ";"));
num = atoi(strtok(NULL, ";"));
error = atoi(strtok(NULL, ";"));
client.publish(topic_raw, StrToChar(cmd));
cmd = "";
strComplete = false;
}
! if (millis() - prevMillis >= poll) {
// wdt_reset();
Serial.println("WDT_reset-");
prevMillis = millis();
if (cnt != prev_cnt || pwr != prev_pwr || amp != prev_amp) {
prev_cnt = cnt;
prev_pwr = pwr;
prev_amp = amp;
client.publish(topic_cnt, IntToChar(cnt));
client.publish(topic_pwr, IntToChar(pwr));
client.publish(topic_amp, IntToChar(amp));
}
if (num != prev_num || bounce != prev_bounce) {
prev_num = num;
prev_bounce = bounce;
client.publish(topic_num, IntToChar(num));
client.publish(topic_bounce, IntToChar(bounce));
}
if (error > 0) {
client.publish(topic_err, "err");
} else {
client.publish(topic_err, " ");
}
}
}
! void callback_iobroker(String strTopic, String strPayload) {
if (strTopic == topic_correction) {
cnt = atol((strPayload).c_str());
Serial.print("SC");
Serial.println(cnt);
client.publish(topic_correction, "0");
}
else if (strTopic == topic_save) {
if (strPayload == "true") {
Serial.println("SS");
save();
client.publish(topic_save, "false");
}
}
else if (strTopic == topic_polling) {
poll = strPayload.toInt();
if (poll < 1000) {
poll = 1000;
} else if (poll > 32767) {
poll = 32767;
}
EEPROMWriteInt(POLL_ADR, poll); //Интервал публикации
client.publish(topic_polling, IntToChar(poll));
}
else if (strTopic == topic_reset) {
if (strPayload == "true") {
client.publish(topic_reset, "false");
// reboot();
Serial.println("Reboot");
}
}
else if (strTopic == topic_bounce) {
bounce = strPayload.toInt();
if (bounce < 0) {
bounce = 0;
} else if (bounce > 10000) {
bounce = 10000;
}
Serial.print("SB");
Serial.println(bounce);
client.publish(topic_bounce, IntToChar(bounce));
}
else if (strTopic == topic_num) {
num = strPayload.toInt();
if (num < 0) {
num = 0;
} else if (num > 32767) {
num = 32767;
}
Serial.print("SN");
Serial.println(num);
client.publish(topic_num, IntToChar(num));
}
}
! void save() {
chk = poll - 500;
EEPROMWriteLong(CNT_ADR, cnt); //Пишем показания счетчика в eeprom из переменной
EEPROMWriteInt(POLL_ADR, poll); //Интервал публикации
EEPROMWriteInt(CHK_ADR, chk); //чек
}
! void reboot() {
//save();
//delay(500);
// wdt_enable(WDTO_1S);
Serial.println("void reboot");
//for (;;) {}
}
! char* StrToChar (String str) {
int length = str.length();
str.toCharArray(buf, length + 1);
return buf;
}
! void EEPROMWriteLong(int p_address, unsigned long p_value) {
byte four = (p_value & 0xFF);
byte three = ((p_value >> 8) & 0xFF);
byte two = ((p_value >> 16) & 0xFF);
byte one = ((p_value >> 24) & 0xFF);
EEPROM.write(p_address, four);
EEPROM.write(p_address + 1, three);
EEPROM.write(p_address + 2, two);
EEPROM.write(p_address + 3, one);
}
! unsigned long EEPROMReadLong(int p_address) {
long four = EEPROM.read(p_address);
long three = EEPROM.read(p_address + 1);
long two = EEPROM.read(p_address + 2);
long one = EEPROM.read(p_address + 3);
return ((four << 0) & 0xFF) + ((three << 8) & 0xFFFF) + ((two << 16) & 0xFFFFFF) + ((one << 24) & 0xFFFFFFFF);
}
! void EEPROMWriteInt(int p_address, int p_value) {
byte lowByte = ((p_value >> 0) & 0xFF);
byte highByte = ((p_value >> 8) & 0xFF);
EEPROM.write(p_address, lowByte);
EEPROM.write(p_address + 1, highByte);
}
unsigned int EEPROMReadInt(int p_address) {
byte lowByte = EEPROM.read(p_address);
byte highByte = EEPROM.read(p_address + 1);
return ((lowByte << 0) & 0xFF) + ((highByte << 8) & 0xFF00);
}
! char* IntToChar (unsigned long a) {
sprintf(buf, "%lu", a);
return buf;
}
! void Public() {
sprintf(s, "%d.%d.%d.%d", ip[0], ip[1], ip[2], ip[3]);
client.publish(topic_err, " ");
client.publish(topic_cnt, IntToChar(cnt));
client.publish(topic_pwr, IntToChar(pwr));
client.publish(topic_amp, IntToChar(amp));
client.publish(topic_save, "false");
client.publish(topic_correction, "0");
client.publish(topic_connection, "true");
client.publish(topic_ip, s);
client.publish(topic_polling, IntToChar(poll));
client.publish(topic_bounce, IntToChar(bounce));
client.publish(topic_num, IntToChar(num));
client.publish(topic_reset, "false");
client.subscribe(subscr);
}
void reconnect() {
int a = 0;
while (!client.connected()) {
a++;
digitalWrite(LED, !digitalRead(LED));
//wdt_reset();
Serial.println("WDT reset");
if (client.connect("test")) {
digitalWrite(LED, LOW);
Public();
} else {
delay(10000);
}
if (a >= 10) {
// wdt_enable(WDTO_1S);
Serial.println("WDTO_1S");
}
}
}</avr></eeprom.h></pubsubclient.h></ethernet.h></spi.h>`
! Ни пинга, ни данных....[/i][/i][/i][/i][/code][/spoiler][/i][/i] -
-
IDE 1.8.4, остальное совпадает…...
Хорошо, с программным уровнем разобрались. Теперь аппаратный.... Arduino MEGA 2560+EthernetShield W5100
-
IDE 1.8.4, остальное совпадает…...
Хорошо, с программным уровнем разобрались. Теперь аппаратный.... Arduino MEGA 2560+EthernetShield W5100 `
Да какая разница какая ардуина, я на УНО и W5100 проверял -
Хлебнуфф пивка и выкурив сигаретку, психанул и заменил Arduino MEGA на Arduino NANO- и О ЧУДО!!!! Все заработало…...
Теперь другие вопросы....
в строке RAW получаю такие значения 268494237;4294935483;0;-9325;-120;0, как их разобрать?? Что есть что??
-
ан все таки есть… Щас сборка выглядит так :
Нано собирает инфу от счетчика - УНО обрабатывает - В5100 - отдает на Брокера
В предыдущем вопле ошибочка, Мега заменил на УНО
-
Хлебнуфф пивка и выкурив сигаретку, психанул и заменил Arduino MEGA на Arduino NANO- и О ЧУДО!!!! Все заработало…...
Теперь другие вопросы....
в строке RAW получаю такие значения 268494237;4294935483;0;-9325;-120;0, как их разобрать?? Что есть что?? `
https://github.com/instalator/Electro_C … t.ino#L278https://blog.instalator.ru/archives/711
cnt = atoi(strtok(buffer, ";")); //счетчик
pwr = atoi(strtok(NULL, ";")); //мощность
amp = atoi(strtok(NULL, ";")); //сила тока!
bounce = atoi(strtok(NULL, ";")); //задержка от дребезга
num = atoi(strtok(NULL, ";")); //Значение передаточного числа счетчика. Количество импульсов на 1 кВт*ч
error = atoi(strtok(NULL, ";")); //ошибка
-
По скрипту для счетчика меркурий вынес в отдельную тему http://forum.iobroker.net/viewtopic.php?f=26&t=8148
-
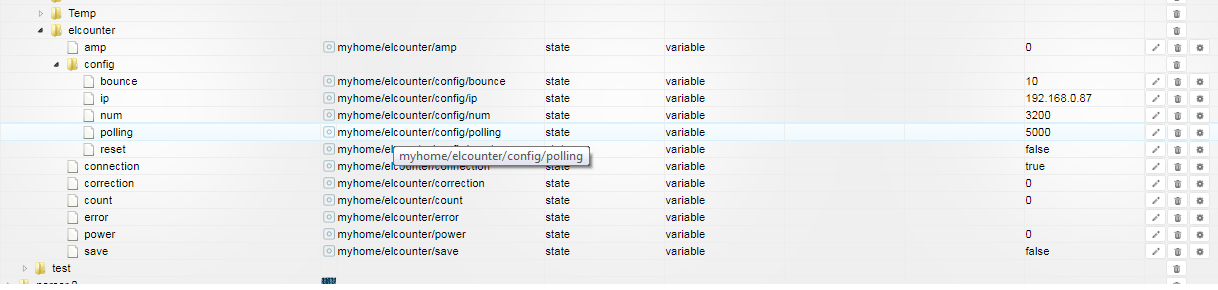
Зенкую! Я так и понял. Но проект заглох… проработав два часа......
и повторно запустить не удалось....
Не могу понять по чему........
1308_counter.png -
Вопрос не в тему, но не знаю куда закинуть.
Есть более важные задачи - наполнение септика..
Для контроля использую следующий скетч:
! ````
#define Trig 9
#define Echo 8
#define ledPin 13
! void setup()
{
pinMode(Trig, OUTPUT); //инициируем как выход
pinMode(Echo, INPUT); //инициируем как вход
pinMode(ledPin, OUTPUT);
Serial.begin(9600);
/* задаем скорость общения. В нашем случае с компьютером /
}
unsigned int impulseTime=0;
unsigned int distance_sm=0;
! void loop()
{
digitalWrite(Trig, HIGH);
/ Подаем импульс на вход trig дальномера */
delayMicroseconds(10); // равный 10 микросекундам
digitalWrite(Trig, LOW); // Отключаем
impulseTime=pulseIn(Echo, HIGH); // Замеряем длину импульса
distance_sm=impulseTime/58; // Пересчитываем в сантиметры
Serial.println(distance_sm); // Выводим на порт
if (distance_sm<50) // Если расстояние менее 30 сантиметром
{
digitalWrite(ledPin, HIGH); // Светодиод горит
}
else
{
digitalWrite(ledPin, LOW); // иначе не горит
}
delay(10000);
}Подскажите как загнать его в Брокер, хочется через MQTT Для температуры использую вот это: >! ``` `#include <spi.h> // Ethernet shield #include <ethernet.h> // Ethernet shield #include <pubsubclient.h> // MQTT #include <servo.h> #include <dht.h> #include <onewire.h> #include <dallastemperature.h> Servo servo; >! byte mac[] = { 0xC1, 0x7C, 0x38, 0x41, 0x89, 0x35 }; byte server[] = { 192, 168, 0, 11 }; //IP Брокера byte ip[] = { 192, 168, 0, 89 }; //IP Клиента (Arduino) >! //////////////////////////////////////////////////////////////////////////// void callback(char* topic, byte* payload, unsigned int length) { payload[length] = '\0'; // Serial.print(topic); // Serial.print("="); String strTopic = String(topic); String strPayload = String((char*)payload); // Serial.println(strPayload); callback_iobroker(strTopic, strPayload); } >! EthernetClient ethClient; PubSubClient client(server, 1883, callback, ethClient); #define id_connect "myhome-temp" #define id_connect "myhome-status" #define Prefix_subscribe "myhome/Temp/" #define Prefix_subscribe "myhome/Status/" >! ///////////////Объявляем порты ввода-вывода #define ServoPin 3 //Порт к которому подключен сервопривод >! const int start_DI_pin []= {2, 4, 5}; // Порты Ввода int n_DI_pin = sizeof(start_DI_pin) / sizeof(start_DI_pin[0])-1; //Вычисляем длинну массива >! const int start_DO_pin []= {6, 7}; //Порты Вывода int n_DO_pin = sizeof(start_DO_pin) / sizeof(start_DO_pin[0])-1; //Вычисляем длинну массива >! int DI[] = {0, 0, 0}; int old_DI[] = {0, 0, 0}; >! ///////////////////////////Переменные для работы с освещением////////////////////////////////////// int ServoAngle = 100; //Угол сервопривода при включении int flag = 0; int flag2 = 0; int pause = 0; >! //------------------------------------------- Sensors -------------------------------------------// const int MQ7_Pin = A0; // Куда подключили MQ7 //int MQ7Value = 0; int MQ7Value = analogRead(MQ7_Pin); const int foto_Pin = A1; // устанавливаем входную ногу для Фоторезистора //unsigned int fotoValue = 0; // цифровое значение фоторезистора unsigned int fotoValue = analogRead(foto_Pin); >! #define ONE_WIRE_BUS 8 //#define TEMPERATURE_PRECISION 9 OneWire oneWire(ONE_WIRE_BUS); DallasTemperature DS_sensors(&oneWire); // 28 80 E9 3A 04 00 00 10 //T0:28 88 AD D7 02 00 00 42 //T1:28 14 A5 D7 02 00 00 B0 //T2:28 72 26 7B 04 00 00 2E //T3:28 CA 1A 3B 04 00 00 CD //T4:28 E6 D5 D7 02 00 00 C1 //T5:28 16 B4 7A 04 00 00 8A //T6:28 2B 86 D7 02 00 00 CF //T7:28 AB 9D D7 02 00 00 29 DeviceAddress addr_T1 = { 0x28, 0x80, 0xE9, 0x3A, 0x4, 0x0, 0x0, 0x10 };//кладовка DeviceAddress addr_T2 = { 0x28, 0x88, 0xAD, 0xD7, 0x2, 0x0, 0x0, 0x42 };//кухня DeviceAddress addr_T3 = { 0x28, 0x14, 0xA5, 0xD7, 0x2, 0x0, 0x0, 0xB0 };//детская DeviceAddress addr_T4 = { 0x28, 0x72, 0x26, 0x7B, 0x4, 0x0, 0x0, 0x2E };//гараж DeviceAddress addr_T5 = { 0x28, 0xCA, 0x1A, 0x3B, 0x4, 0x0, 0x0, 0xCD };//ванная DeviceAddress addr_T6 = { 0x28, 0xE6, 0xD5, 0xD7, 0x2, 0x0, 0x0, 0xC1 };//улица DeviceAddress addr_T7 = { 0x28, 0x16, 0xB4, 0x7A, 0x4, 0x0, 0x0, 0x8A };//спальня2 DeviceAddress addr_T8 = { 0x28, 0x2B, 0x86, 0xD7, 0x2, 0x0, 0x0, 0xCF };//зал DeviceAddress addr_T9 = { 0x28, 0xAB, 0x9D, 0xD7, 0x2, 0x0, 0x0, 0x29 };//мансарда >! float T1=0; float T2=0; float T3=0; float T4=0; float T5=0; float T6=0; float T7=0; float T8=0; float T9=0; >! //dht DHT; //#define DHT22_PIN 9 //float Hout = 0; //float Tout = 0; >! //////////////////////////////////////////////////////////////////////////// //void callback(char* topic, byte* payload, unsigned int length) { // payload[length] = '\0'; // Serial.print(topic); // Serial.print("="); // String strTopic = String(topic); // String strPayload = String((char*)payload); // Serial.println(strPayload); // callback_iobroker(strTopic, strPayload); //} //////////////////////////////////////////////////////////////////////////// void setup() { Serial.begin(57600); Serial.println("start"); Serial.print("Locating devices..."); DS_sensors.begin(); Serial.print("Found "); Serial.print(DS_sensors.getDeviceCount(), DEC); Serial.println(" devices."); >! // report parasite power requirements Serial.print("Parasite power is: "); if (DS_sensors.isParasitePowerMode()) Serial.println("ON"); else Serial.println("OFF"); //Объявляем порты Digital inputs/outputs for(int i=0 ;i<=n_DI_pin; i++) { pinMode (start_DI_pin [i], INPUT); } digitalWrite(5, HIGH); //Насос скважины digitalWrite(4, HIGH); //Электрика for(int i=0 ;i<=n_DO_pin; i++) { pinMode (start_DO_pin [i], OUTPUT); } >! Ethernet.begin(mac, ip); if (client.connect(id_connect)) { getSensors(); control(); //client.publish("myhome/Kitchen/Change_Counter", "0"); //client.publish("myhome/Kitchen/Temp_room", "0"); //client.publish("myhome/Kitchen/Humidity_room", "0"); client.publish("myhome/Temp/Kladovka", "0"); client.publish("myhome/Temp/Kitchen", "0"); client.publish("myhome/Temp/Detskaya", "0"); client.publish("myhome/Temp/Garage", "0"); client.publish("myhome/Temp/Street", "0"); client.publish("myhome/Temp/Spalnya2", "0"); client.publish("myhome/Temp/Zal", "0"); client.publish("myhome/Temp/Mansarda", "0"); client.publish("myhome/Temp/Vannaya", "0"); //client.publish("myhome/Kitchen/Lux", "0"); //client.publish("myhome/Kitchen/Servo", "0"); client.publish("myhome/Temp/MQ7", "0"); client.publish("myhome/Status/Power", "0"); client.publish("myhome/Status/Pompe", "0"); client.subscribe("myhome/Temp/#"); client.subscribe("myhome/Status/#"); } } ///////////////////////////////////////////////////////////////////////// void loop() { client.loop(); control(); getSensors(); if (!client.connected()) { if (client.connect(id_connect)) { control(); getSensors(); client.subscribe("myhome/Temp/#"); } } }</dallastemperature.h></onewire.h></dht.h></servo.h></pubsubclient.h></ethernet.h></spi.h>` И это Function >! >! ~~[spoiler]~~`~~[code]~~//--------------------------------- Functions ---------------------------------// /////////////////////////////////От Брокера////////////////////////////////////////////// void callback_iobroker(String strTopic, String strPayload){ if (strTopic == "myhome/Kitchen/Servo"){ ServoAngle=strPayload.toInt(); if (ServoAngle >= 0 && ServoAngle <= 255){ servo.attach(ServoPin); //delay(200); //ждем 2 секунды servo.write(ServoAngle); //ставим вал под 0 delay(1000); //ждем 2 секунды //client.publish("myhome/Kitchen/Servo", b); servo.detach(); } } } >! ////////////////////////////////////Брокеру///////////////////////////////////// void control(){ if(digitalRead(5)==HIGH && flag==0) { //если насос включен client.publish("myhome/Status/Pompe", "1"); flag=1; } if(digitalRead(5)==LOW && flag==1){//если насос выключен client.publish("myhome/Status/Pompe", "0"); flag=0;//обнуляем переменную flag } if(digitalRead(4)==HIGH && flag2==0) { // Если электрика есть client.publish("myhome/Status/Power", "1"); flag2=1; } if(digitalRead(4)==LOW && flag2==1){// Если эректрики нет client.publish("myhome/Status/Power", "0"); flag2=0;//обнуляем переменную flag } } ///////////////////////////////Данные сенсоров//////////////////////////////////// >! void getSensors () { >! MQ7Value = analogRead(MQ7_Pin); fotoValue = analogRead(foto_Pin); // считываем значение с фоторезистора // ServoAngle = analogRead(2); >! //Обработка данных датчика DHT22\. Подключение к порту цифровому P9 Arduino //Глобальные переменные Hout и Tout типа флоат - влажность (%) и температура (град. С) // if (DHT.read22(DHT22_PIN)== DHTLIB_OK) { // Hout = DHT.humidity; // Tout = DHT.temperature; // } // if (Hout == 0 || Tout == 0){ // delay (1000); // if (DHT.read22(DHT22_PIN)== DHTLIB_OK) { // Hout = DHT.humidity; // Tout = DHT.temperature; // } // } //Обработка данных цифровых датчиков температуры типа DS18B20. //Шина 1-Wire на цифровой пин P8 Arduino. //Подключено 2 датчика температуры, адреса задаются в секции глобальных констант "Sensors" //Три значение температуры T1, T2, типа float (град. С). DS_sensors.setResolution(addr_T1, 9); DS_sensors.setResolution(addr_T2, 9); DS_sensors.setResolution(addr_T3, 9); DS_sensors.setResolution(addr_T4, 9); DS_sensors.setResolution(addr_T5, 9); DS_sensors.setResolution(addr_T6, 9); DS_sensors.setResolution(addr_T7, 9); DS_sensors.setResolution(addr_T8, 9); DS_sensors.setResolution(addr_T9, 9); float T1 = DS_sensors.getTempC(addr_T1); float T2 = DS_sensors.getTempC(addr_T2); float T3 = DS_sensors.getTempC(addr_T3); float T4 = DS_sensors.getTempC(addr_T4); float T5 = DS_sensors.getTempC(addr_T5); float T6 = DS_sensors.getTempC(addr_T6); float T7 = DS_sensors.getTempC(addr_T7); float T8 = DS_sensors.getTempC(addr_T8); float T9 = DS_sensors.getTempC(addr_T9); DS_sensors.requestTemperatures(); //Serial.print(DS_sensors.getResolution(addr_T1), DEC); Serial.println(); Serial.print("Temp T1 C: "); Serial.print(T1); Serial.println(); >! Serial.println(); Serial.print("Temp T2 C: "); Serial.print(T2); Serial.println(); // Serial.println(); Serial.print("Temp T3 C: "); Serial.print(T3); Serial.println(); // Serial.println(); Serial.print("Temp T4 C: "); Serial.print(T4); Serial.println(); // Serial.println(); Serial.print("Temp T5 C: "); Serial.print(T5); Serial.println(); // Serial.println(); Serial.print("Temp T6 C: "); Serial.print(T6); Serial.println(); // Serial.println(); Serial.print("Temp T7 C: "); Serial.print(T7); Serial.println(); // Serial.println(); Serial.print("Temp T8 C: "); Serial.print(T8); Serial.println(); // Serial.println(); Serial.print("Temp T9 C: "); Serial.print(T9); Serial.println(); // ///////////////////////Паблик данных сенсоров//////////////////////// if (pause == 50 || pause == 0){ char b[5]; // String char_Hout = String(Hout); // char_Hout.toCharArray(b,5); // client.publish("myhome/Kitchen/Humidity_room", b); // String char_Tout = String(Tout); // char_Tout.toCharArray(b,5); // client.publish("myhome/Kitchen/Temp_room", b); String char_T1 = String(T1); char_T1.toCharArray(b,5); client.publish("myhome/Temp/Kladovka", b); String char_T2 = String(T2); char_T2.toCharArray(b,5); client.publish("myhome/Temp/Kitchen", b); String char_T3 = String(T3); char_T3.toCharArray(b,5); client.publish("myhome/Temp/Detskaya", b); String char_T4 = String(T4); char_T4.toCharArray(b,5); client.publish("myhome/Temp/Garage", b); String char_T5 = String(T5); char_T5.toCharArray(b,5); client.publish("myhome/Temp/Vannaya", b); String char_T6 = String(T6); char_T6.toCharArray(b,5); client.publish("myhome/Temp/Street", b); String char_T7 = String(T7); char_T7.toCharArray(b,5); client.publish("myhome/Temp/Spalnya2", b); String char_T8 = String(T8); char_T8.toCharArray(b,5); client.publish("myhome/Temp/Zal", b); String char_T9 = String(T9); char_T9.toCharArray(b,5); client.publish("myhome/Temp/Mansarda", b); //Serial.println(T1); String char_fotoValue = String(fotoValue); char_fotoValue.toCharArray(b,4); client.publish("myhome/Kitchen/Lux", b); String char_ServoAngle = String(ServoAngle); char_ServoAngle.toCharArray(b,4); client.publish("myhome/Kitchen/Servo", b); String char_MQ7Value = String(MQ7Value); char_MQ7Value.toCharArray(b,4); client.publish("myhome/Temp/MQ7", b); pause = 1; } else pause++; } >! [/code]`[/spoiler] >! Показания от септика получаю в значениях см, типа 160 см, 100 см.....[/i][/i] ```
{kind=link}
Support us
582
Online32.7k
Users82.3k
Topics1.3m
Posts