

Скрипт для счётчика
-
IDE 1.6.13 этот скетч - работает, все пингуется и данные идут
! ```
`#include <spi.h> // Ethernet shield
#include <ethernet.h> // Ethernet shield
#include <pubsubclient.h> // MQTT
#include <servo.h>
#include <dht.h>
#include <onewire.h>
#include <dallastemperature.h>
Servo servo;
! byte mac[] = { 0xC1, 0x7C, 0x38, 0x41, 0x89, 0x35 };
byte server[] = { 192, 168, 0, 11 }; //IP Брокера
byte ip[] = { 192, 168, 0, 89 }; //IP Клиента (Arduino)
! ////////////////////////////////////////////////////////////////////////////
void callback(char* topic, byte* payload, unsigned int length) {
payload[length] = '\0';
// Serial.print(topic);
// Serial.print("=");
String strTopic = String(topic);
String strPayload = String((char*)payload);
// Serial.println(strPayload);
callback_iobroker(strTopic, strPayload);
}
! EthernetClient ethClient;
PubSubClient client(server, 1883, callback, ethClient);
#define id_connect "myhome-temp"
#define id_connect "myhome-status"
#define Prefix_subscribe "myhome/Temp/"
#define Prefix_subscribe "myhome/Status/"
! ///////////////Объявляем порты ввода-вывода
#define ServoPin 3 //Порт к которому подключен сервопривод
! const int start_DI_pin []= {2, 4, 5}; // Порты Ввода
int n_DI_pin = sizeof(start_DI_pin) / sizeof(start_DI_pin[0])-1; //Вычисляем длинну массива
! const int start_DO_pin []= {6, 7}; //Порты Вывода
int n_DO_pin = sizeof(start_DO_pin) / sizeof(start_DO_pin[0])-1; //Вычисляем длинну массива
! int DI[] = {0, 0, 0};
int old_DI[] = {0, 0, 0};
! ///////////////////////////Переменные для работы с освещением//////////////////////////////////////
int ServoAngle = 100; //Угол сервопривода при включении
int flag = 0;
int flag2 = 0;
int pause = 0;
! //------------------------------------------- Sensors -------------------------------------------//
const int MQ7_Pin = A0; // Куда подключили MQ7
//int MQ7Value = 0;
int MQ7Value = analogRead(MQ7_Pin);const int foto_Pin = A1; // устанавливаем входную ногу для Фоторезистора
//unsigned int fotoValue = 0; // цифровое значение фоторезистора
unsigned int fotoValue = analogRead(foto_Pin);! #define ONE_WIRE_BUS 8
//#define TEMPERATURE_PRECISION 9
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature DS_sensors(&oneWire);
// 28 80 E9 3A 04 00 00 10
//T0:28 88 AD D7 02 00 00 42
//T1:28 14 A5 D7 02 00 00 B0
//T2:28 72 26 7B 04 00 00 2E
//T3:28 CA 1A 3B 04 00 00 CD
//T4:28 E6 D5 D7 02 00 00 C1
//T5:28 16 B4 7A 04 00 00 8A
//T6:28 2B 86 D7 02 00 00 CF
//T7:28 AB 9D D7 02 00 00 29
DeviceAddress addr_T1 = { 0x28, 0x80, 0xE9, 0x3A, 0x4, 0x0, 0x0, 0x10 };//кладовка
DeviceAddress addr_T2 = { 0x28, 0x88, 0xAD, 0xD7, 0x2, 0x0, 0x0, 0x42 };//кухня
DeviceAddress addr_T3 = { 0x28, 0x14, 0xA5, 0xD7, 0x2, 0x0, 0x0, 0xB0 };//детская
DeviceAddress addr_T4 = { 0x28, 0x72, 0x26, 0x7B, 0x4, 0x0, 0x0, 0x2E };//гараж
DeviceAddress addr_T5 = { 0x28, 0xCA, 0x1A, 0x3B, 0x4, 0x0, 0x0, 0xCD };//ванная
DeviceAddress addr_T6 = { 0x28, 0xE6, 0xD5, 0xD7, 0x2, 0x0, 0x0, 0xC1 };//улица
DeviceAddress addr_T7 = { 0x28, 0x16, 0xB4, 0x7A, 0x4, 0x0, 0x0, 0x8A };//спальня2
DeviceAddress addr_T8 = { 0x28, 0x2B, 0x86, 0xD7, 0x2, 0x0, 0x0, 0xCF };//зал
DeviceAddress addr_T9 = { 0x28, 0xAB, 0x9D, 0xD7, 0x2, 0x0, 0x0, 0x29 };//мансарда
! float T1=0;
float T2=0;
float T3=0;
float T4=0;
float T5=0;
float T6=0;
float T7=0;
float T8=0;
float T9=0;
! //dht DHT;
//#define DHT22_PIN 9
//float Hout = 0;
//float Tout = 0;
! ////////////////////////////////////////////////////////////////////////////
//void callback(char* topic, byte* payload, unsigned int length) {
// payload[length] = '\0';
// Serial.print(topic);
// Serial.print("=");
// String strTopic = String(topic);
// String strPayload = String((char*)payload);
// Serial.println(strPayload);
// callback_iobroker(strTopic, strPayload);
//}
////////////////////////////////////////////////////////////////////////////
void setup() {
Serial.begin(57600);
Serial.println("start");Serial.print("Locating devices...");
DS_sensors.begin();
Serial.print("Found ");
Serial.print(DS_sensors.getDeviceCount(), DEC);
Serial.println(" devices.");! // report parasite power requirements
Serial.print("Parasite power is: ");
if (DS_sensors.isParasitePowerMode()) Serial.println("ON");
else Serial.println("OFF");//Объявляем порты Digital inputs/outputsfor(int i=0 ;i<=n_DI_pin; i++) { pinMode (start_DI_pin [i], INPUT); }
digitalWrite(5, HIGH); //Насос скважины
digitalWrite(4, HIGH); //Электрика
for(int i=0 ;i<=n_DO_pin; i++) { pinMode (start_DO_pin [i], OUTPUT); }! Ethernet.begin(mac, ip);
if (client.connect(id_connect)) {
getSensors();
control();
//client.publish("myhome/Kitchen/Change_Counter", "0");
//client.publish("myhome/Kitchen/Temp_room", "0");
//client.publish("myhome/Kitchen/Humidity_room", "0");
client.publish("myhome/Temp/Kladovka", "0");
client.publish("myhome/Temp/Kitchen", "0");
client.publish("myhome/Temp/Detskaya", "0");
client.publish("myhome/Temp/Garage", "0");
client.publish("myhome/Temp/Street", "0");
client.publish("myhome/Temp/Spalnya2", "0");
client.publish("myhome/Temp/Zal", "0");
client.publish("myhome/Temp/Mansarda", "0");
client.publish("myhome/Temp/Vannaya", "0");//client.publish("myhome/Kitchen/Lux", "0"); //client.publish("myhome/Kitchen/Servo", "0"); client.publish("myhome/Temp/MQ7", "0"); client.publish("myhome/Status/Power", "0"); client.publish("myhome/Status/Pompe", "0"); client.subscribe("myhome/Temp/#"); client.subscribe("myhome/Status/#");}
}
/////////////////////////////////////////////////////////////////////////
void loop() {
client.loop();
control();
getSensors();
if (!client.connected()) {
if (client.connect(id_connect)) {
control();
getSensors();
client.subscribe("myhome/Temp/#");
}
}
}</dallastemperature.h></onewire.h></dht.h></servo.h></pubsubclient.h></ethernet.h></spi.h>`! А заливаем этот - и ни чего....
! >![spoiler]`[code]#include <spi.h>
#include <ethernet.h>
#include <pubsubclient.h>
#include <eeprom.h>
//#include <avr wdt.h="">
! #define PWR_CTRL A2 //Контроль напряжения
#define LED 9 //Светодиод
#define CHK_ADR 100
#define CNT_ADR 10
#define PWR_ADR 20
#define POLL_ADR 30
#define RATIO_ADR 40
! const char* topic_err = "myhome/test/error";
const char* topic_cnt = "myhome/test/count";
const char* topic_pwr = "myhome/test/power";
const char* topic_amp = "myhome/test/amp";
const char* topic_save = "myhome/test/save";
const char* topic_correction = "myhome/test/correction";
const char* topic_connection = "myhome/test/connection";
const char* topic_ip = "myhome/test/config/ip";
const char* topic_polling = "myhome/test/config/polling";
const char* topic_bounce = "myhome/test/config/bounce";
const char* topic_num = "myhome/test/config/num";
const char* topic_reset = "myhome/test/config/reset";
const char* topic_raw = "myhome/test/RAW";
const char* subscr = "myhome/test/#";
! byte mac[] = { 0xDE, 0xA3, 0xBE, 0xE4, 0xDE, 0x35 };
byte ip[] = { 192, 168, 0, 89};
byte server[] = { 192, 168, 0, 15};
! unsigned long cnt = 0;
unsigned long prev_cnt = 2;
unsigned long pwr = 0;
unsigned long prev_pwr = 2;
int amp = 0;
int prev_amp = 2;
int num = 0;
int prev_num;
int bounce = 10;
int prev_bounce;
int chk = 0;
int chk_S = 0;
unsigned long prevMillis = 0;
unsigned long prevMillis_cnt = 0;
int poll = 5000;
bool error = 0;
String cmd = "";
bool strComplete = false;
char buf [50];
char buffer[100];
char s[16];
! ////////////////////////////////////////////////////////////////////////////
void callback(char* topic, byte* payload, unsigned int length) {
payload[length] = '\0';
String strTopic = String(topic);
String strPayload = String((char*)payload);
callback_iobroker(strTopic, strPayload);
}
! EthernetClient ethClient;
PubSubClient client(ethClient);
! void setup() {
Serial.begin(57600);
//MCUSR = 0;
// wdt_disable();
Serial.println("WDT_disable");
cmd.reserve(100);
delay(10000);Serial.println("Starting......");
! if (EEPROM.read(1) != 99) { //Если первый запуск
EEPROM.write(1, 99);
for (int i = 0 ; i < 4; i++) {
EEPROM.write(110 + i, ip[i]);
}
for (int i = 0 ; i < 4; i++) {
EEPROM.write(120 + i, server[i]);
}
} else {
chk = EEPROMReadInt(CHK_ADR);
cnt = EEPROMReadLong(CNT_ADR);
poll = EEPROMReadInt(POLL_ADR);
chk_S = poll - 500;
if (chk != chk_S) {
error = 2;
}
for (int i = 0; i < 4; i++) {
ip[i] = EEPROM.read(110 + i);
}
for (int i = 0; i < 4; i++) {
server[i] = EEPROM.read(120 + i);
}
}
! pinMode(LED, OUTPUT);
! client.setServer(server, 1883);
client.setCallback(callback);
Ethernet.begin(mac, ip);delay(200);
//wdt_enable(WDTO_8S);
Serial.println("WDTO_8S");
if (client.connect("test")){
digitalWrite(LED, LOW);
Public();
}
}! void serialEvent() {
while (Serial.available() > 0) {
char inChar = (char)Serial.read();
cmd += inChar;
if (inChar == '\n') {
strComplete = true;
}
}
}
! void loop() {
// wdt_reset();
Serial.println("WDT_reset");
client.loop();
if (!client.connected()) {
reconnect();
}
! /if (analogRead(PWR_CTRL) < 1000) {
digitalWrite(LED, LOW);
save();
delay(10000);
}/
! if (strComplete) {
digitalWrite(LED, !digitalRead(LED));
cmd.toCharArray(buffer, 100);
cnt = atoi(strtok(buffer, ";"));
pwr = atoi(strtok(NULL, ";"));
amp = atoi(strtok(NULL, ";"));
bounce = atoi(strtok(NULL, ";"));
num = atoi(strtok(NULL, ";"));
error = atoi(strtok(NULL, ";"));
client.publish(topic_raw, StrToChar(cmd));
cmd = "";
strComplete = false;
}
! if (millis() - prevMillis >= poll) {
// wdt_reset();
Serial.println("WDT_reset-");
prevMillis = millis();
if (cnt != prev_cnt || pwr != prev_pwr || amp != prev_amp) {
prev_cnt = cnt;
prev_pwr = pwr;
prev_amp = amp;
client.publish(topic_cnt, IntToChar(cnt));
client.publish(topic_pwr, IntToChar(pwr));
client.publish(topic_amp, IntToChar(amp));
}
if (num != prev_num || bounce != prev_bounce) {
prev_num = num;
prev_bounce = bounce;
client.publish(topic_num, IntToChar(num));
client.publish(topic_bounce, IntToChar(bounce));
}
if (error > 0) {
client.publish(topic_err, "err");
} else {
client.publish(topic_err, " ");
}
}
}
! void callback_iobroker(String strTopic, String strPayload) {
if (strTopic == topic_correction) {
cnt = atol((strPayload).c_str());
Serial.print("SC");
Serial.println(cnt);
client.publish(topic_correction, "0");
}
else if (strTopic == topic_save) {
if (strPayload == "true") {
Serial.println("SS");
save();
client.publish(topic_save, "false");
}
}
else if (strTopic == topic_polling) {
poll = strPayload.toInt();
if (poll < 1000) {
poll = 1000;
} else if (poll > 32767) {
poll = 32767;
}
EEPROMWriteInt(POLL_ADR, poll); //Интервал публикации
client.publish(topic_polling, IntToChar(poll));
}
else if (strTopic == topic_reset) {
if (strPayload == "true") {
client.publish(topic_reset, "false");
// reboot();
Serial.println("Reboot");
}
}
else if (strTopic == topic_bounce) {
bounce = strPayload.toInt();
if (bounce < 0) {
bounce = 0;
} else if (bounce > 10000) {
bounce = 10000;
}
Serial.print("SB");
Serial.println(bounce);
client.publish(topic_bounce, IntToChar(bounce));
}
else if (strTopic == topic_num) {
num = strPayload.toInt();
if (num < 0) {
num = 0;
} else if (num > 32767) {
num = 32767;
}
Serial.print("SN");
Serial.println(num);
client.publish(topic_num, IntToChar(num));
}
}
! void save() {
chk = poll - 500;
EEPROMWriteLong(CNT_ADR, cnt); //Пишем показания счетчика в eeprom из переменной
EEPROMWriteInt(POLL_ADR, poll); //Интервал публикации
EEPROMWriteInt(CHK_ADR, chk); //чек
}
! void reboot() {
//save();
//delay(500);
// wdt_enable(WDTO_1S);
Serial.println("void reboot");
//for (;;) {}
}
! char* StrToChar (String str) {
int length = str.length();
str.toCharArray(buf, length + 1);
return buf;
}
! void EEPROMWriteLong(int p_address, unsigned long p_value) {
byte four = (p_value & 0xFF);
byte three = ((p_value >> 8) & 0xFF);
byte two = ((p_value >> 16) & 0xFF);
byte one = ((p_value >> 24) & 0xFF);
EEPROM.write(p_address, four);
EEPROM.write(p_address + 1, three);
EEPROM.write(p_address + 2, two);
EEPROM.write(p_address + 3, one);
}
! unsigned long EEPROMReadLong(int p_address) {
long four = EEPROM.read(p_address);
long three = EEPROM.read(p_address + 1);
long two = EEPROM.read(p_address + 2);
long one = EEPROM.read(p_address + 3);
return ((four << 0) & 0xFF) + ((three << 8) & 0xFFFF) + ((two << 16) & 0xFFFFFF) + ((one << 24) & 0xFFFFFFFF);
}
! void EEPROMWriteInt(int p_address, int p_value) {
byte lowByte = ((p_value >> 0) & 0xFF);
byte highByte = ((p_value >> 8) & 0xFF);
EEPROM.write(p_address, lowByte);
EEPROM.write(p_address + 1, highByte);
}
unsigned int EEPROMReadInt(int p_address) {
byte lowByte = EEPROM.read(p_address);
byte highByte = EEPROM.read(p_address + 1);
return ((lowByte << 0) & 0xFF) + ((highByte << 8) & 0xFF00);
}
! char* IntToChar (unsigned long a) {
sprintf(buf, "%lu", a);
return buf;
}
! void Public() {
sprintf(s, "%d.%d.%d.%d", ip[0], ip[1], ip[2], ip[3]);
client.publish(topic_err, " ");
client.publish(topic_cnt, IntToChar(cnt));
client.publish(topic_pwr, IntToChar(pwr));
client.publish(topic_amp, IntToChar(amp));
client.publish(topic_save, "false");
client.publish(topic_correction, "0");
client.publish(topic_connection, "true");
client.publish(topic_ip, s);
client.publish(topic_polling, IntToChar(poll));
client.publish(topic_bounce, IntToChar(bounce));
client.publish(topic_num, IntToChar(num));
client.publish(topic_reset, "false");
client.subscribe(subscr);
}
void reconnect() {
int a = 0;
while (!client.connected()) {
a++;
digitalWrite(LED, !digitalRead(LED));
//wdt_reset();
Serial.println("WDT reset");
if (client.connect("test")) {
digitalWrite(LED, LOW);
Public();
} else {
delay(10000);
}
if (a >= 10) {
// wdt_enable(WDTO_1S);
Serial.println("WDTO_1S");
}
}
}</avr></eeprom.h></pubsubclient.h></ethernet.h></spi.h>`
! Ни пинга, ни данных....[/i][/i][/i][/i][/code][/spoiler][/i][/i] -
-
IDE 1.8.4, остальное совпадает…...
Хорошо, с программным уровнем разобрались. Теперь аппаратный.... Arduino MEGA 2560+EthernetShield W5100
-
IDE 1.8.4, остальное совпадает…...
Хорошо, с программным уровнем разобрались. Теперь аппаратный.... Arduino MEGA 2560+EthernetShield W5100 `
Да какая разница какая ардуина, я на УНО и W5100 проверял -
Хлебнуфф пивка и выкурив сигаретку, психанул и заменил Arduino MEGA на Arduino NANO- и О ЧУДО!!!! Все заработало…...
Теперь другие вопросы....
в строке RAW получаю такие значения 268494237;4294935483;0;-9325;-120;0, как их разобрать?? Что есть что??
-
ан все таки есть… Щас сборка выглядит так :
Нано собирает инфу от счетчика - УНО обрабатывает - В5100 - отдает на Брокера
В предыдущем вопле ошибочка, Мега заменил на УНО
-
Хлебнуфф пивка и выкурив сигаретку, психанул и заменил Arduino MEGA на Arduino NANO- и О ЧУДО!!!! Все заработало…...
Теперь другие вопросы....
в строке RAW получаю такие значения 268494237;4294935483;0;-9325;-120;0, как их разобрать?? Что есть что?? `
https://github.com/instalator/Electro_C … t.ino#L278https://blog.instalator.ru/archives/711
cnt = atoi(strtok(buffer, ";")); //счетчик
pwr = atoi(strtok(NULL, ";")); //мощность
amp = atoi(strtok(NULL, ";")); //сила тока!
bounce = atoi(strtok(NULL, ";")); //задержка от дребезга
num = atoi(strtok(NULL, ";")); //Значение передаточного числа счетчика. Количество импульсов на 1 кВт*ч
error = atoi(strtok(NULL, ";")); //ошибка
-
По скрипту для счетчика меркурий вынес в отдельную тему http://forum.iobroker.net/viewtopic.php?f=26&t=8148
-
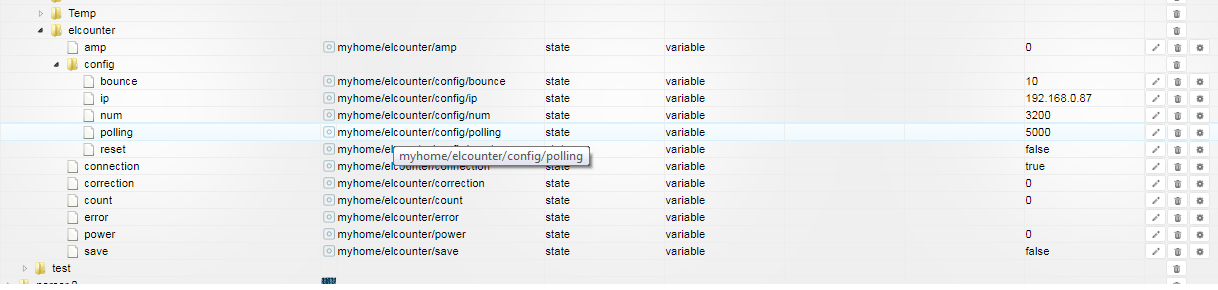
Зенкую! Я так и понял. Но проект заглох… проработав два часа......
и повторно запустить не удалось....
Не могу понять по чему........
1308_counter.png -
Вопрос не в тему, но не знаю куда закинуть.
Есть более важные задачи - наполнение септика..
Для контроля использую следующий скетч:
! ````
#define Trig 9
#define Echo 8
#define ledPin 13
! void setup()
{
pinMode(Trig, OUTPUT); //инициируем как выход
pinMode(Echo, INPUT); //инициируем как вход
pinMode(ledPin, OUTPUT);
Serial.begin(9600);
/* задаем скорость общения. В нашем случае с компьютером /
}
unsigned int impulseTime=0;
unsigned int distance_sm=0;
! void loop()
{
digitalWrite(Trig, HIGH);
/ Подаем импульс на вход trig дальномера */
delayMicroseconds(10); // равный 10 микросекундам
digitalWrite(Trig, LOW); // Отключаем
impulseTime=pulseIn(Echo, HIGH); // Замеряем длину импульса
distance_sm=impulseTime/58; // Пересчитываем в сантиметры
Serial.println(distance_sm); // Выводим на порт
if (distance_sm<50) // Если расстояние менее 30 сантиметром
{
digitalWrite(ledPin, HIGH); // Светодиод горит
}
else
{
digitalWrite(ledPin, LOW); // иначе не горит
}
delay(10000);
}Подскажите как загнать его в Брокер, хочется через MQTT Для температуры использую вот это: >! ``` `#include <spi.h> // Ethernet shield #include <ethernet.h> // Ethernet shield #include <pubsubclient.h> // MQTT #include <servo.h> #include <dht.h> #include <onewire.h> #include <dallastemperature.h> Servo servo; >! byte mac[] = { 0xC1, 0x7C, 0x38, 0x41, 0x89, 0x35 }; byte server[] = { 192, 168, 0, 11 }; //IP Брокера byte ip[] = { 192, 168, 0, 89 }; //IP Клиента (Arduino) >! //////////////////////////////////////////////////////////////////////////// void callback(char* topic, byte* payload, unsigned int length) { payload[length] = '\0'; // Serial.print(topic); // Serial.print("="); String strTopic = String(topic); String strPayload = String((char*)payload); // Serial.println(strPayload); callback_iobroker(strTopic, strPayload); } >! EthernetClient ethClient; PubSubClient client(server, 1883, callback, ethClient); #define id_connect "myhome-temp" #define id_connect "myhome-status" #define Prefix_subscribe "myhome/Temp/" #define Prefix_subscribe "myhome/Status/" >! ///////////////Объявляем порты ввода-вывода #define ServoPin 3 //Порт к которому подключен сервопривод >! const int start_DI_pin []= {2, 4, 5}; // Порты Ввода int n_DI_pin = sizeof(start_DI_pin) / sizeof(start_DI_pin[0])-1; //Вычисляем длинну массива >! const int start_DO_pin []= {6, 7}; //Порты Вывода int n_DO_pin = sizeof(start_DO_pin) / sizeof(start_DO_pin[0])-1; //Вычисляем длинну массива >! int DI[] = {0, 0, 0}; int old_DI[] = {0, 0, 0}; >! ///////////////////////////Переменные для работы с освещением////////////////////////////////////// int ServoAngle = 100; //Угол сервопривода при включении int flag = 0; int flag2 = 0; int pause = 0; >! //------------------------------------------- Sensors -------------------------------------------// const int MQ7_Pin = A0; // Куда подключили MQ7 //int MQ7Value = 0; int MQ7Value = analogRead(MQ7_Pin); const int foto_Pin = A1; // устанавливаем входную ногу для Фоторезистора //unsigned int fotoValue = 0; // цифровое значение фоторезистора unsigned int fotoValue = analogRead(foto_Pin); >! #define ONE_WIRE_BUS 8 //#define TEMPERATURE_PRECISION 9 OneWire oneWire(ONE_WIRE_BUS); DallasTemperature DS_sensors(&oneWire); // 28 80 E9 3A 04 00 00 10 //T0:28 88 AD D7 02 00 00 42 //T1:28 14 A5 D7 02 00 00 B0 //T2:28 72 26 7B 04 00 00 2E //T3:28 CA 1A 3B 04 00 00 CD //T4:28 E6 D5 D7 02 00 00 C1 //T5:28 16 B4 7A 04 00 00 8A //T6:28 2B 86 D7 02 00 00 CF //T7:28 AB 9D D7 02 00 00 29 DeviceAddress addr_T1 = { 0x28, 0x80, 0xE9, 0x3A, 0x4, 0x0, 0x0, 0x10 };//кладовка DeviceAddress addr_T2 = { 0x28, 0x88, 0xAD, 0xD7, 0x2, 0x0, 0x0, 0x42 };//кухня DeviceAddress addr_T3 = { 0x28, 0x14, 0xA5, 0xD7, 0x2, 0x0, 0x0, 0xB0 };//детская DeviceAddress addr_T4 = { 0x28, 0x72, 0x26, 0x7B, 0x4, 0x0, 0x0, 0x2E };//гараж DeviceAddress addr_T5 = { 0x28, 0xCA, 0x1A, 0x3B, 0x4, 0x0, 0x0, 0xCD };//ванная DeviceAddress addr_T6 = { 0x28, 0xE6, 0xD5, 0xD7, 0x2, 0x0, 0x0, 0xC1 };//улица DeviceAddress addr_T7 = { 0x28, 0x16, 0xB4, 0x7A, 0x4, 0x0, 0x0, 0x8A };//спальня2 DeviceAddress addr_T8 = { 0x28, 0x2B, 0x86, 0xD7, 0x2, 0x0, 0x0, 0xCF };//зал DeviceAddress addr_T9 = { 0x28, 0xAB, 0x9D, 0xD7, 0x2, 0x0, 0x0, 0x29 };//мансарда >! float T1=0; float T2=0; float T3=0; float T4=0; float T5=0; float T6=0; float T7=0; float T8=0; float T9=0; >! //dht DHT; //#define DHT22_PIN 9 //float Hout = 0; //float Tout = 0; >! //////////////////////////////////////////////////////////////////////////// //void callback(char* topic, byte* payload, unsigned int length) { // payload[length] = '\0'; // Serial.print(topic); // Serial.print("="); // String strTopic = String(topic); // String strPayload = String((char*)payload); // Serial.println(strPayload); // callback_iobroker(strTopic, strPayload); //} //////////////////////////////////////////////////////////////////////////// void setup() { Serial.begin(57600); Serial.println("start"); Serial.print("Locating devices..."); DS_sensors.begin(); Serial.print("Found "); Serial.print(DS_sensors.getDeviceCount(), DEC); Serial.println(" devices."); >! // report parasite power requirements Serial.print("Parasite power is: "); if (DS_sensors.isParasitePowerMode()) Serial.println("ON"); else Serial.println("OFF"); //Объявляем порты Digital inputs/outputs for(int i=0 ;i<=n_DI_pin; i++) { pinMode (start_DI_pin [i], INPUT); } digitalWrite(5, HIGH); //Насос скважины digitalWrite(4, HIGH); //Электрика for(int i=0 ;i<=n_DO_pin; i++) { pinMode (start_DO_pin [i], OUTPUT); } >! Ethernet.begin(mac, ip); if (client.connect(id_connect)) { getSensors(); control(); //client.publish("myhome/Kitchen/Change_Counter", "0"); //client.publish("myhome/Kitchen/Temp_room", "0"); //client.publish("myhome/Kitchen/Humidity_room", "0"); client.publish("myhome/Temp/Kladovka", "0"); client.publish("myhome/Temp/Kitchen", "0"); client.publish("myhome/Temp/Detskaya", "0"); client.publish("myhome/Temp/Garage", "0"); client.publish("myhome/Temp/Street", "0"); client.publish("myhome/Temp/Spalnya2", "0"); client.publish("myhome/Temp/Zal", "0"); client.publish("myhome/Temp/Mansarda", "0"); client.publish("myhome/Temp/Vannaya", "0"); //client.publish("myhome/Kitchen/Lux", "0"); //client.publish("myhome/Kitchen/Servo", "0"); client.publish("myhome/Temp/MQ7", "0"); client.publish("myhome/Status/Power", "0"); client.publish("myhome/Status/Pompe", "0"); client.subscribe("myhome/Temp/#"); client.subscribe("myhome/Status/#"); } } ///////////////////////////////////////////////////////////////////////// void loop() { client.loop(); control(); getSensors(); if (!client.connected()) { if (client.connect(id_connect)) { control(); getSensors(); client.subscribe("myhome/Temp/#"); } } }</dallastemperature.h></onewire.h></dht.h></servo.h></pubsubclient.h></ethernet.h></spi.h>` И это Function >! >! ~~[spoiler]~~`~~[code]~~//--------------------------------- Functions ---------------------------------// /////////////////////////////////От Брокера////////////////////////////////////////////// void callback_iobroker(String strTopic, String strPayload){ if (strTopic == "myhome/Kitchen/Servo"){ ServoAngle=strPayload.toInt(); if (ServoAngle >= 0 && ServoAngle <= 255){ servo.attach(ServoPin); //delay(200); //ждем 2 секунды servo.write(ServoAngle); //ставим вал под 0 delay(1000); //ждем 2 секунды //client.publish("myhome/Kitchen/Servo", b); servo.detach(); } } } >! ////////////////////////////////////Брокеру///////////////////////////////////// void control(){ if(digitalRead(5)==HIGH && flag==0) { //если насос включен client.publish("myhome/Status/Pompe", "1"); flag=1; } if(digitalRead(5)==LOW && flag==1){//если насос выключен client.publish("myhome/Status/Pompe", "0"); flag=0;//обнуляем переменную flag } if(digitalRead(4)==HIGH && flag2==0) { // Если электрика есть client.publish("myhome/Status/Power", "1"); flag2=1; } if(digitalRead(4)==LOW && flag2==1){// Если эректрики нет client.publish("myhome/Status/Power", "0"); flag2=0;//обнуляем переменную flag } } ///////////////////////////////Данные сенсоров//////////////////////////////////// >! void getSensors () { >! MQ7Value = analogRead(MQ7_Pin); fotoValue = analogRead(foto_Pin); // считываем значение с фоторезистора // ServoAngle = analogRead(2); >! //Обработка данных датчика DHT22\. Подключение к порту цифровому P9 Arduino //Глобальные переменные Hout и Tout типа флоат - влажность (%) и температура (град. С) // if (DHT.read22(DHT22_PIN)== DHTLIB_OK) { // Hout = DHT.humidity; // Tout = DHT.temperature; // } // if (Hout == 0 || Tout == 0){ // delay (1000); // if (DHT.read22(DHT22_PIN)== DHTLIB_OK) { // Hout = DHT.humidity; // Tout = DHT.temperature; // } // } //Обработка данных цифровых датчиков температуры типа DS18B20. //Шина 1-Wire на цифровой пин P8 Arduino. //Подключено 2 датчика температуры, адреса задаются в секции глобальных констант "Sensors" //Три значение температуры T1, T2, типа float (град. С). DS_sensors.setResolution(addr_T1, 9); DS_sensors.setResolution(addr_T2, 9); DS_sensors.setResolution(addr_T3, 9); DS_sensors.setResolution(addr_T4, 9); DS_sensors.setResolution(addr_T5, 9); DS_sensors.setResolution(addr_T6, 9); DS_sensors.setResolution(addr_T7, 9); DS_sensors.setResolution(addr_T8, 9); DS_sensors.setResolution(addr_T9, 9); float T1 = DS_sensors.getTempC(addr_T1); float T2 = DS_sensors.getTempC(addr_T2); float T3 = DS_sensors.getTempC(addr_T3); float T4 = DS_sensors.getTempC(addr_T4); float T5 = DS_sensors.getTempC(addr_T5); float T6 = DS_sensors.getTempC(addr_T6); float T7 = DS_sensors.getTempC(addr_T7); float T8 = DS_sensors.getTempC(addr_T8); float T9 = DS_sensors.getTempC(addr_T9); DS_sensors.requestTemperatures(); //Serial.print(DS_sensors.getResolution(addr_T1), DEC); Serial.println(); Serial.print("Temp T1 C: "); Serial.print(T1); Serial.println(); >! Serial.println(); Serial.print("Temp T2 C: "); Serial.print(T2); Serial.println(); // Serial.println(); Serial.print("Temp T3 C: "); Serial.print(T3); Serial.println(); // Serial.println(); Serial.print("Temp T4 C: "); Serial.print(T4); Serial.println(); // Serial.println(); Serial.print("Temp T5 C: "); Serial.print(T5); Serial.println(); // Serial.println(); Serial.print("Temp T6 C: "); Serial.print(T6); Serial.println(); // Serial.println(); Serial.print("Temp T7 C: "); Serial.print(T7); Serial.println(); // Serial.println(); Serial.print("Temp T8 C: "); Serial.print(T8); Serial.println(); // Serial.println(); Serial.print("Temp T9 C: "); Serial.print(T9); Serial.println(); // ///////////////////////Паблик данных сенсоров//////////////////////// if (pause == 50 || pause == 0){ char b[5]; // String char_Hout = String(Hout); // char_Hout.toCharArray(b,5); // client.publish("myhome/Kitchen/Humidity_room", b); // String char_Tout = String(Tout); // char_Tout.toCharArray(b,5); // client.publish("myhome/Kitchen/Temp_room", b); String char_T1 = String(T1); char_T1.toCharArray(b,5); client.publish("myhome/Temp/Kladovka", b); String char_T2 = String(T2); char_T2.toCharArray(b,5); client.publish("myhome/Temp/Kitchen", b); String char_T3 = String(T3); char_T3.toCharArray(b,5); client.publish("myhome/Temp/Detskaya", b); String char_T4 = String(T4); char_T4.toCharArray(b,5); client.publish("myhome/Temp/Garage", b); String char_T5 = String(T5); char_T5.toCharArray(b,5); client.publish("myhome/Temp/Vannaya", b); String char_T6 = String(T6); char_T6.toCharArray(b,5); client.publish("myhome/Temp/Street", b); String char_T7 = String(T7); char_T7.toCharArray(b,5); client.publish("myhome/Temp/Spalnya2", b); String char_T8 = String(T8); char_T8.toCharArray(b,5); client.publish("myhome/Temp/Zal", b); String char_T9 = String(T9); char_T9.toCharArray(b,5); client.publish("myhome/Temp/Mansarda", b); //Serial.println(T1); String char_fotoValue = String(fotoValue); char_fotoValue.toCharArray(b,4); client.publish("myhome/Kitchen/Lux", b); String char_ServoAngle = String(ServoAngle); char_ServoAngle.toCharArray(b,4); client.publish("myhome/Kitchen/Servo", b); String char_MQ7Value = String(MQ7Value); char_MQ7Value.toCharArray(b,4); client.publish("myhome/Temp/MQ7", b); pause = 1; } else pause++; } >! [/code]`[/spoiler] >! Показания от септика получаю в значениях см, типа 160 см, 100 см.....[/i][/i] ```
{kind=link}
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
476
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge