

Homematic Jalousienaktor HmIP-FBL über VIS Slider steuern
-
Re: Homematic Jalousien steuern
Hallo zusammen, nachdem ich jetzt einige Stunden damit gekämpft habe eine Lösung zur Steuerung von HmIP-FBL Jalousienaktor über VIS zu realisieren habe ich folgende Lösung gefunden und wollte mal die Profis unter euch fragen ob das nicht irgendwie einfacher geht?
Also Ausgangslage sind 2 Slider im VIS mit welchen ich getrennt den Behang und die Lamelle einstellen möchte.
Problem: Die HmIP-FBL reagieren nicht auf das Ändern von Objekt "LEVEL_2" (Lamellenposition). Es muss anscheinend auch zumindest "LEVEL" (Behangposition) aktualisiert werden damit der Motor beginnt zu laufen.
Ich habe dann versucht über Skripte/blockly eine Logik zu erstellen welche bei Änderung von LEVEL_2 den Wert von LEVEL aktualisiert. Das hat aber alles nicht sauber funktioniert da die Endpositionen nicht exakt angefahren wurden und die Einstellungen eher ungefähr dem entsprachen was ich eingestellt hatte. Das liegt vermutlich daran, dass beide Werte gleichzeitig in der CCU benötigt werden um die exakte Position zu ermitteln.
Deshalb habe ich beide Werte im "COMBINED_PARAMETER" über "erstelle Text aus", verknüpft und übertragen. Sieht jetzt wie folgt aus: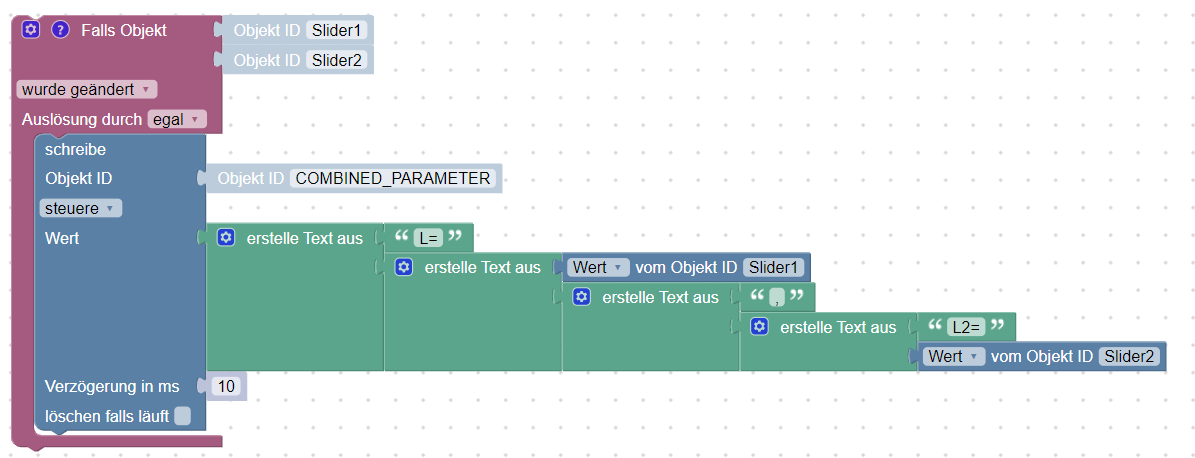
Die beiden Slider konnte ich nicht direkt mit den Objekten LEVEL und LEVEL_2 verknüpfen da dies offenbar durch zeitliche Verzögerungen ebenfalls zu keinen exakten Positionen führte. Lösung war die Slider als Objekte in 0_userdata anzulegen und die Werte dann bei Änderung in den "COMBINED_PARAMETER" zu übertragen.
Jetzt klingt das für mich natürlich alles etwas ineffizient gelöst. Es funktioniert zwar einwandfrei, aber ich frage mich ob es nicht eine elegantere Lösungen dafür gibt?
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
492
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge