

IRobot Roomba Adapter
-
Ich hatte auch die Meldung
Cannot read property 'toString' of null
im Log.Ursache war anscheinend die fehlenden Einträge unter:
roomba.0.missions.currentNachdem ich die Einträge von Hand hinzugefügt habe werden diese vom Adapter verwendet und im Log gibt es keinen Fehler mehr.
-
Ich habe heute festgestellt das es bei mir ein kleines Problem mit dem i7 gibt.
Job 211 wurde wie geplant gestartet und sah auch am Anfang sehr gut aus!
Karte wurde gezeichnet, Zeit und Fläche wurde hoch gezählt.
Dann musste der Akku nachgeladen werden.
Im Anschluss war es immer noch Job 211 und die Fläche war auch noch die alte.
Allerdings wurde die Zeit (Startzeit und Dauer) und die Karte zurückgesetzt und dann nur noch mit den Daten nach dem laden gefüttert. Dies ist auch nach Abschluss so geblieben.
Somit ist die History für mich eigentlich Wertlos.
Job 211 zeigt die falsche Zeit und nur einen Teil der Karte...
Konnte jemand anders das schon einmal beobachten? -
Ich hatte auch die Meldung
Cannot read property 'toString' of null
im Log.Ursache war anscheinend die fehlenden Einträge unter:
roomba.0.missions.currentNachdem ich die Einträge von Hand hinzugefügt habe werden diese vom Adapter verwendet und im Log gibt es keinen Fehler mehr.
@fvp said in IRobot Roomba Adapter:
Ich hatte auch die Meldung
Cannot read property 'toString' of null
im Log.Ursache war anscheinend die fehlenden Einträge unter:
roomba.0.missions.currentNachdem ich die Einträge von Hand hinzugefügt habe werden diese vom Adapter verwendet und im Log gibt es keinen Fehler mehr.
Moin, bei mir fehlen die Einträge auch, was genau hast du eingetragen und was muss ich beachten?
Danke und schöne Grüße
-
@fvp said in IRobot Roomba Adapter:
Ich hatte auch die Meldung
Cannot read property 'toString' of null
im Log.Ursache war anscheinend die fehlenden Einträge unter:
roomba.0.missions.currentNachdem ich die Einträge von Hand hinzugefügt habe werden diese vom Adapter verwendet und im Log gibt es keinen Fehler mehr.
Moin, bei mir fehlen die Einträge auch, was genau hast du eingetragen und was muss ich beachten?
Danke und schöne Grüße
Vieleicht hat @Zefau noch eine bessere Variante die Datenpunkte zu erstellen?
Hier mal ein Screenshot der Datenpunkte.
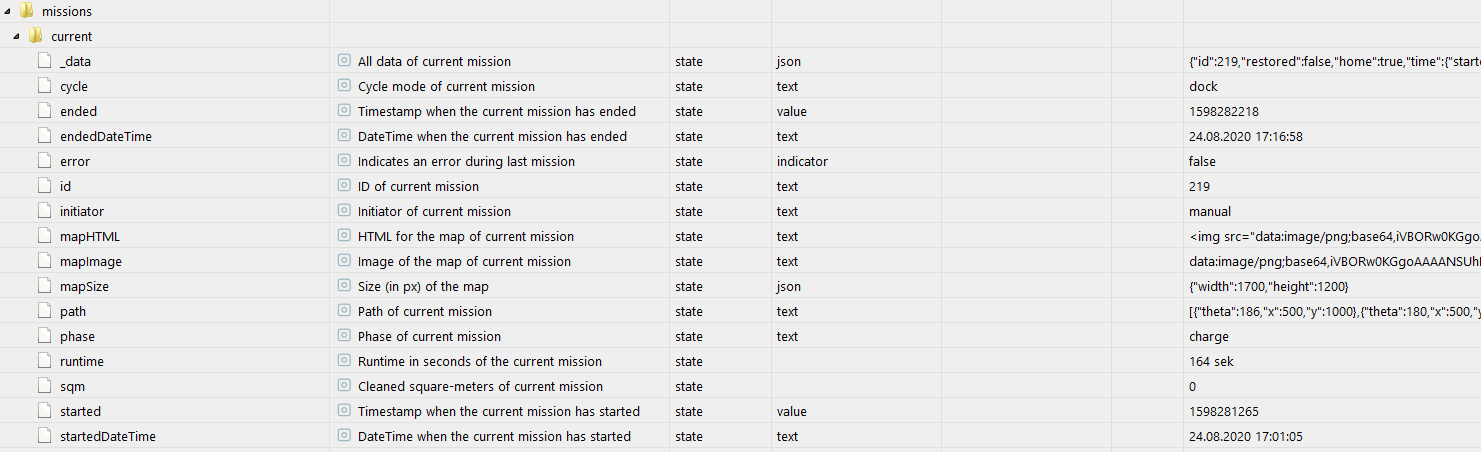
und hier die RAW Einträge
{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255191, "common": { "name": "All data of current mission", "role": "json", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current._data", "type": "state" }{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255194, "common": { "name": "Cycle mode of current mission", "role": "text", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.cycle", "type": "state" }{ "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597476142637, "common": { "name": "Timestamp when the current mission has ended", "role": "value", "type": "string", "desc": "Timestamp when the current mission has ended", "def": "", "read": true, "write": true }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.ended", "type": "state" }{ "_id": "roomba.0.missions.current.endedDateTime", "type": "state", "common": { "name": "DateTime when the current mission has ended", "role": "text", "type": "string", "desc": "DateTime when the current mission has ended", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597476060069, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "common": { "name": "Indicates an error during last mission", "role": "indicator", "type": "boolean", "write": false }, "type": "state", "native": {}, "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1589192844012, "_id": "roomba.0.missions.current.error", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }{ "_id": "roomba.0.missions.current.id", "type": "state", "common": { "name": "ID of current mission", "role": "text", "type": "string", "desc": "ID of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475913235, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.initiator", "type": "state", "common": { "name": "Initiator of current mission", "role": "text", "type": "string", "desc": "Initiator of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475853384, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapHTML", "type": "state", "common": { "name": "HTML for the map of current mission", "role": "text", "type": "string", "desc": "HTML for the map of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475796745, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapImage", "type": "state", "common": { "name": "Image of the map of current mission", "role": "text", "type": "string", "desc": "Image of the map of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475737183, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapSize", "type": "state", "common": { "name": "Size (in px) of the map", "role": "json", "type": "string", "desc": "Size (in px) of the map", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475646885, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.path", "type": "state", "common": { "name": "Path of current mission", "role": "text", "type": "string", "desc": "Path of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475576123, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "common": { "name": "Phase of current mission", "role": "text", "type": "string", "write": false }, "type": "state", "native": {}, "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1589192844011, "_id": "roomba.0.missions.current.phase", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255194, "common": { "name": "Runtime in seconds of the current mission", "role": "value", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.runtime", "type": "state" }{ "_id": "roomba.0.missions.current.sqm", "type": "state", "common": { "name": "Cleaned square-meters of current mission", "role": "", "type": "string", "desc": "Cleaned square-meters of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475207130, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.started", "type": "state", "common": { "name": "Timestamp when the current mission has started", "role": "value", "type": "string", "desc": "Timestamp when the current mission has started", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475455408, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.startedDateTime", "type": "state", "common": { "name": "DateTime when the current mission has started", "role": "text", "type": "string", "desc": "DateTime when the current mission has started", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475332114, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } } -
Vieleicht hat @Zefau noch eine bessere Variante die Datenpunkte zu erstellen?
Hier mal ein Screenshot der Datenpunkte.
und hier die RAW Einträge
{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255191, "common": { "name": "All data of current mission", "role": "json", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current._data", "type": "state" }{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255194, "common": { "name": "Cycle mode of current mission", "role": "text", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.cycle", "type": "state" }{ "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597476142637, "common": { "name": "Timestamp when the current mission has ended", "role": "value", "type": "string", "desc": "Timestamp when the current mission has ended", "def": "", "read": true, "write": true }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.ended", "type": "state" }{ "_id": "roomba.0.missions.current.endedDateTime", "type": "state", "common": { "name": "DateTime when the current mission has ended", "role": "text", "type": "string", "desc": "DateTime when the current mission has ended", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597476060069, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "common": { "name": "Indicates an error during last mission", "role": "indicator", "type": "boolean", "write": false }, "type": "state", "native": {}, "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1589192844012, "_id": "roomba.0.missions.current.error", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }{ "_id": "roomba.0.missions.current.id", "type": "state", "common": { "name": "ID of current mission", "role": "text", "type": "string", "desc": "ID of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475913235, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.initiator", "type": "state", "common": { "name": "Initiator of current mission", "role": "text", "type": "string", "desc": "Initiator of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475853384, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapHTML", "type": "state", "common": { "name": "HTML for the map of current mission", "role": "text", "type": "string", "desc": "HTML for the map of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475796745, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapImage", "type": "state", "common": { "name": "Image of the map of current mission", "role": "text", "type": "string", "desc": "Image of the map of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475737183, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapSize", "type": "state", "common": { "name": "Size (in px) of the map", "role": "json", "type": "string", "desc": "Size (in px) of the map", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475646885, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.path", "type": "state", "common": { "name": "Path of current mission", "role": "text", "type": "string", "desc": "Path of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475576123, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "common": { "name": "Phase of current mission", "role": "text", "type": "string", "write": false }, "type": "state", "native": {}, "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1589192844011, "_id": "roomba.0.missions.current.phase", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255194, "common": { "name": "Runtime in seconds of the current mission", "role": "value", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.runtime", "type": "state" }{ "_id": "roomba.0.missions.current.sqm", "type": "state", "common": { "name": "Cleaned square-meters of current mission", "role": "", "type": "string", "desc": "Cleaned square-meters of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475207130, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.started", "type": "state", "common": { "name": "Timestamp when the current mission has started", "role": "value", "type": "string", "desc": "Timestamp when the current mission has started", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475455408, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.startedDateTime", "type": "state", "common": { "name": "DateTime when the current mission has started", "role": "text", "type": "string", "desc": "DateTime when the current mission has started", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475332114, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } } -
Vieleicht hat @Zefau noch eine bessere Variante die Datenpunkte zu erstellen?
Hier mal ein Screenshot der Datenpunkte.
und hier die RAW Einträge
{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255191, "common": { "name": "All data of current mission", "role": "json", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current._data", "type": "state" }{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255194, "common": { "name": "Cycle mode of current mission", "role": "text", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.cycle", "type": "state" }{ "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597476142637, "common": { "name": "Timestamp when the current mission has ended", "role": "value", "type": "string", "desc": "Timestamp when the current mission has ended", "def": "", "read": true, "write": true }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.ended", "type": "state" }{ "_id": "roomba.0.missions.current.endedDateTime", "type": "state", "common": { "name": "DateTime when the current mission has ended", "role": "text", "type": "string", "desc": "DateTime when the current mission has ended", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597476060069, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "common": { "name": "Indicates an error during last mission", "role": "indicator", "type": "boolean", "write": false }, "type": "state", "native": {}, "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1589192844012, "_id": "roomba.0.missions.current.error", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }{ "_id": "roomba.0.missions.current.id", "type": "state", "common": { "name": "ID of current mission", "role": "text", "type": "string", "desc": "ID of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475913235, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.initiator", "type": "state", "common": { "name": "Initiator of current mission", "role": "text", "type": "string", "desc": "Initiator of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475853384, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapHTML", "type": "state", "common": { "name": "HTML for the map of current mission", "role": "text", "type": "string", "desc": "HTML for the map of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475796745, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapImage", "type": "state", "common": { "name": "Image of the map of current mission", "role": "text", "type": "string", "desc": "Image of the map of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475737183, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.mapSize", "type": "state", "common": { "name": "Size (in px) of the map", "role": "json", "type": "string", "desc": "Size (in px) of the map", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475646885, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.path", "type": "state", "common": { "name": "Path of current mission", "role": "text", "type": "string", "desc": "Path of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475576123, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "common": { "name": "Phase of current mission", "role": "text", "type": "string", "write": false }, "type": "state", "native": {}, "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1589192844011, "_id": "roomba.0.missions.current.phase", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }{ "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255194, "common": { "name": "Runtime in seconds of the current mission", "role": "value", "type": "string", "write": false }, "native": {}, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 }, "_id": "roomba.0.missions.current.runtime", "type": "state" }{ "_id": "roomba.0.missions.current.sqm", "type": "state", "common": { "name": "Cleaned square-meters of current mission", "role": "", "type": "string", "desc": "Cleaned square-meters of current mission", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475207130, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.started", "type": "state", "common": { "name": "Timestamp when the current mission has started", "role": "value", "type": "string", "desc": "Timestamp when the current mission has started", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475455408, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }{ "_id": "roomba.0.missions.current.startedDateTime", "type": "state", "common": { "name": "DateTime when the current mission has started", "role": "text", "type": "string", "desc": "DateTime when the current mission has started", "def": "", "read": true, "write": true }, "native": {}, "from": "system.adapter.admin.0", "user": "system.user.admin", "ts": 1597475332114, "acl": { "object": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator", "state": 1636 } }@fvp hat super geklappt!
Zuerst wurden mir zwar die Werte angezeigt jedoch nicht ausgegeben wenn sie abgefragt wurden, musste den jeweiligen Wert einmal manuell updaten dann hat’s auch geklappt!
Einzig nur, mir werden noch die Werte angegeben, von der letzten Aufgabe bevor dieses Problem auftrat, hoffe das aktualisiert sich mit der nächsten Aufgabe wieder...
Danke nochmal für dein Hinweis

-
Sind aktuell irgend welche Probleme mit dem Roomba Adapter 1.1.1. bekannt? Ich frage nur, weil ich heute festgestellt habe, das Aufruf des Webinterface des Adapter nicht mehr funktioniert.
Die Objekt Datenpunkte und die Canvas Karte wird aber brav erstellt. Nur der Aufruf des Web Interface liefert das hier. Im LOG gibt es keine Fehlermeldung dazu.
BTW @Zefau - magst du hier vielleicht auch beitreten?
https://forum.iobroker.net/topic/36313/willkommen-beim-iobroker-discord-channel
-
Sind aktuell irgend welche Probleme mit dem Roomba Adapter 1.1.1. bekannt? Ich frage nur, weil ich heute festgestellt habe, das Aufruf des Webinterface des Adapter nicht mehr funktioniert.
Die Objekt Datenpunkte und die Canvas Karte wird aber brav erstellt. Nur der Aufruf des Web Interface liefert das hier. Im LOG gibt es keine Fehlermeldung dazu.BTW @Zefau - magst du hier vielleicht auch beitreten?
https://forum.iobroker.net/topic/36313/willkommen-beim-iobroker-discord-channel
@JB_Sullivan kann ich nicht bestätigen. V1.1.1 und Web Inerface ok.
Debian VM auf QNAP Host. -
@JB_Sullivan kann ich nicht bestätigen. V1.1.1 und Web Inerface ok.
Debian VM auf QNAP Host.@fvp Aus dem heimischen Netzwerk heraus, keine Chance. Gehe ich aber Remote über die ioB Cloud drauf funktioniert es .
BTW - ist eigentlich bei den Datenpunkten die json Tabelle mit den History Daten nicht mehr an Board? Die hat sich bei mir seit "100 Jahren" nicht mehr aktualisiert und als ich den Datenpunkt gelöscht habe und nach einem Instanz Neustart auf eine aktualisierte jason Datenpunkt Tabelle gehofft hatte, war der Datenpunkt ganz verschwunden.
Ist der mal irgend einem Update zum Opfer gefallen?
-
@fvp Aus dem heimischen Netzwerk heraus, keine Chance. Gehe ich aber Remote über die ioB Cloud drauf funktioniert es .
BTW - ist eigentlich bei den Datenpunkten die json Tabelle mit den History Daten nicht mehr an Board? Die hat sich bei mir seit "100 Jahren" nicht mehr aktualisiert und als ich den Datenpunkt gelöscht habe und nach einem Instanz Neustart auf eine aktualisierte jason Datenpunkt Tabelle gehofft hatte, war der Datenpunkt ganz verschwunden.
Ist der mal irgend einem Update zum Opfer gefallen?
@JB_Sullivan Da kann ich dir leider nicht so recht helfen. Kann dir nur sagen das es hier im LAN noch funktioniert.
Bzgl. dem Historydatenpunkt:
Dieser war bei mir auch nicht mehr vorhanden. Auch hier hat das manuelle erstellen geholfen:

{ "common": { "name": "History of all missions", "role": "json", "type": "string", "write": false }, "type": "state", "native": {}, "from": "system.adapter.roomba.0", "user": "system.user.admin", "ts": 1573151255189, "_id": "roomba.0.missions.history", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } } -
Hallo zusammen,
entschuldigt bitte, jedoch es hat mir keine Ruhe gelassen.
Ich habe die roomba.js dahin gehend angepasst sodass der _runCommand Befehl funktioniert.@Zefau : es wäre super wenn Du das prüfen könntest und ggf. einchecken.
Ich habe folgendes angepasst:
Zeile 151
else if (action == '_runCommand' && state.ack !== true) { robot.publish('cmd', state.val, () => { adapter.log.info('Ran command ' + state.val + '!'); }); }Zeile 616
if (node.node !== undefined) { let leafnode = node.node.substr(node.node.lastIndexOf('.')+1); //adapter.log.info('Leafnode: ' + leafnode + '.'); if ((leafnode) && (leafnode === '_runCommand' ) && listeners[node.node] === undefined) { adapter.log.info('Subscripe Leafnode: ' + leafnode + '.'); adapter.subscribeStates(node.node); // attach state listener listeners[node.node] = node; } adapter.getState(node.node, function(err, res) { if ((err !== null || !res) && (node.node !== undefined && node.description !== undefined)) library.set(node, ''); }); }Ich habe es bei mir getestet und das _runCommand funktioniert.
{ "command": "start", "ordered": 1, "params": { "carpetBoost": false, "noAutoPasses": false, "twoPass": false, "vacHigh": false }, "pmap_id": "yourmapid", "regions": [ { "region_id": "12", "type": "rid" } ], "user_pmapv_id": "yourid" }Ich bekomme immer wieder ein "Cannot read property 'toString' of null" aber da bin ich dran.
Ich denke das habe ich mir eingefangen als ich die Nodes etwas verändert habe.LG und have fun
Kai@Ashuan ich würde den i7 auch gerne in bestimmte Räume schicken. Leider habe ich deine Erklärung noch nicht ganz verstanden :/
Ich habe unter /opt/iobroker/node_modules/iobroker.roomba eine roomba.js gefunden und diese durch deine ersetzt.
Soweit korrekt ?
Was muss ich den nun unter 'roomba.0.commands._runCommand' eingeben damit Wohnzimmer und Flur gesaugt wird ?
Vielen Dank!
-
Moin ich hab jetzt wieder das Problem, dass meine Objekte (current) nicht aktualisiert werden 😫
Nach dem ich diese manuell wieder hinzugefügt habe, hat bis heute alles funktioniert, jetzt wird mir in den Logs wieder angezeigt „Canvas not installed!“.
Canvas lief von Anfang an lange problemlos, nun wird mir ständig aufs Neue dieses problem gemeldet, wie kann es sein, dass sich canvas immer verabschiedet?
Oder wo könnte das Problem liegen?Roomba 1.1.1, Node v12.16.3, js-Controller 3.1.4
Edit: Nachdem ich canvas neu installiert habe, wird mir kein Fehler in den Logs angezeigt, jedoch (restored last mission (#601).) das wäre die letzte mission bevor der Fehler aufgetreten ist, ich schätze es sollte die nächste wieder aktualisiert werden, aber da muss doch was nicht stimmen!
-
@Ashuan ich würde den i7 auch gerne in bestimmte Räume schicken. Leider habe ich deine Erklärung noch nicht ganz verstanden :/
Ich habe unter /opt/iobroker/node_modules/iobroker.roomba eine roomba.js gefunden und diese durch deine ersetzt.
Soweit korrekt ?
Was muss ich den nun unter 'roomba.0.commands._runCommand' eingeben damit Wohnzimmer und Flur gesaugt wird ?
Vielen Dank!
-
Moin ich hab jetzt wieder das Problem, dass meine Objekte (current) nicht aktualisiert werden 😫
Nach dem ich diese manuell wieder hinzugefügt habe, hat bis heute alles funktioniert, jetzt wird mir in den Logs wieder angezeigt „Canvas not installed!“.
Canvas lief von Anfang an lange problemlos, nun wird mir ständig aufs Neue dieses problem gemeldet, wie kann es sein, dass sich canvas immer verabschiedet?
Oder wo könnte das Problem liegen?Roomba 1.1.1, Node v12.16.3, js-Controller 3.1.4
Edit: Nachdem ich canvas neu installiert habe, wird mir kein Fehler in den Logs angezeigt, jedoch (restored last mission (#601).) das wäre die letzte mission bevor der Fehler aufgetreten ist, ich schätze es sollte die nächste wieder aktualisiert werden, aber da muss doch was nicht stimmen!
Moin moin,
Gibt es eine Möglichkeit die Position der Karte zu fixen?
Ich habe in meiner vis ein Grundriss unter die Karte gepackt, die Karte bleibt jedoch nie komplett gleich, mal ist sie etwas verdreht mal stimmt die Proportion nicht ganz, im Grunde passt die nie wirklich gut auf den Grundriss 😅
Gibt es hier die Möglichkeit diese anzupassen oder hat jemand eine andere Idee?
In der App ist natürlich eine komplett andere Karte abgebildet, aber diese ist zumindest immer grade vom Grundriss her 🤔Außerdem habe ich leider immernoch das Problem, dass sich canvas bei mir immer zerlegt, auch hier wäre ich für Ideen dankbar, im debug/Log ist nichts zu finden nur beim Neustart dann das canvas nicht installiert ist, installiere ich canvas neu, funktioniert alles wieder eine Weile...
Danke und schöne Grüße Peter
-
Moin moin,
Gibt es eine Möglichkeit die Position der Karte zu fixen?
Ich habe in meiner vis ein Grundriss unter die Karte gepackt, die Karte bleibt jedoch nie komplett gleich, mal ist sie etwas verdreht mal stimmt die Proportion nicht ganz, im Grunde passt die nie wirklich gut auf den Grundriss 😅
Gibt es hier die Möglichkeit diese anzupassen oder hat jemand eine andere Idee?
In der App ist natürlich eine komplett andere Karte abgebildet, aber diese ist zumindest immer grade vom Grundriss her 🤔Außerdem habe ich leider immernoch das Problem, dass sich canvas bei mir immer zerlegt, auch hier wäre ich für Ideen dankbar, im debug/Log ist nichts zu finden nur beim Neustart dann das canvas nicht installiert ist, installiere ich canvas neu, funktioniert alles wieder eine Weile...
Danke und schöne Grüße Peter
Hallo zusammen,
ich habe das Problem, dass der Aufruf der Seite .../roomba/index.html nur noch "Loading States..." anzeigt.
Kennt jemand dafür eine Lösung? Vielen Dank im Voruas! -
Hallo zusammen,
ich habe das Problem, dass der Aufruf der Seite .../roomba/index.html nur noch "Loading States..." anzeigt.
Kennt jemand dafür eine Lösung? Vielen Dank im Voruas!Den Adapter oder zur Not das ganze System neu starten, hast mit Sicherheit schon getestet oder? 🙄
-
Den Adapter oder zur Not das ganze System neu starten, hast mit Sicherheit schon getestet oder? 🙄
@Newpicsel ja, beides. Leider ohne Erfolg
-
@fvp Hallo fvp
Ashuan hat mir selber auch bereits geholfen, daher kann ich dir das gerne erklären wenn du willst.
Schreib mir einfach eine PN, alles weitere dann dort.Gruss Kusi
-
@Kusi Hallo Kusi,
habe hier das selbe Problem das nach ändern der roomba.js der _runCommand immer noch nicht funktioniert. Könntest du mir diese erklärung zukommen lassen?
Gruß Patrick
-
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden541
Online33.0k
Benutzer83.3k
Themen1.3m
Beiträge