

IRobot Roomba Adapter
-
host.buanet-iobroker2_Neu_2019 2019-09-21 20:33:15.511 info instance system.adapter.roomba.0 terminated with code 0 (OK)
roomba.0 2019-09-21 20:33:15.493 info Adapter stopped und unloaded.
host.buanet-iobroker2_Neu_2019 2019-09-21 20:33:15.485 info stopInstance system.adapter.roomba.0 killing pid 13832
host.buanet-iobroker2_Neu_2019 2019-09-21 20:33:15.484 info stopInstance system.adapter.roomba.0
roomba.0 2019-09-21 20:33:15.486 info Adapter stopped und unloaded.
host.buanet-iobroker2_Neu_2019 2019-09-21 20:33:15.484 info object change system.adapter.roomba.0
roomba.0 2019-09-21 20:33:08.879 debug sendTo "getIp" to system.adapter.admin.0 from system.adapter.roomba.0
roomba.0 2019-09-21 20:33:08.879 debug Retrieved IP address: undefined
roomba.0 2019-09-21 20:33:08.878 debug Message: {"command":"getIp","message":null,"from":"system.adapter.admin.0","callback":{"message":null,"id":118,"ack":false,"time":1569090788875},"_id":96424122}
roomba.0 2019-09-21 20:33:08.864 debug sendTo "getRobotData" to system.adapter.admin.0 from system.adapter.roomba.0
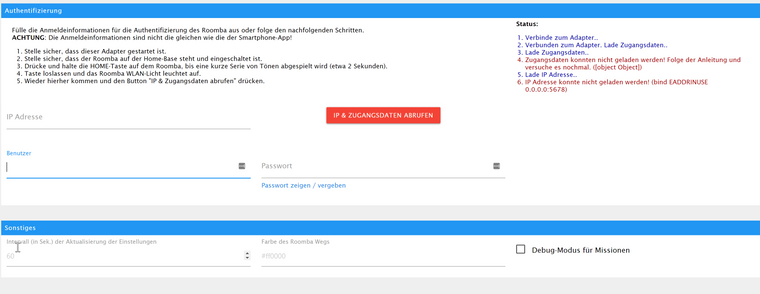
roomba.0 2019-09-21 20:33:08.863 debug Retrieved robot data: {"result":false,"error":{"errno":"EADDRINUSE","code":"EADDRINUSE","syscall":"bind","address":"0.0.0.0","port":5678}}
roomba.0 2019-09-21 20:33:08.861 debug Message: {"command":"getRobotData","message":null,"from":"system.adapter.admin.0","callback":{"message":null,"id":117,"ack":false,"time":1569090788858},"_id":96424120}
roomba.0 2019-09-21 20:32:49.331 debug Message: {"command":"getRobotData","message":null,"from":"system.adapter.admin.0","callback":{"message":null,"id":115,"ack":false,"time":1569090769326},"_id":96424117}
roomba.0 2019-09-21 20:32:44.568 warn Username, password and / or ip address missing!
roomba.0 2019-09-21 20:32:44.383 info starting. Version 1.0.0 in /opt/iobroker/node_modules/iobroker.roomba, node: v8.16.1
roomba.0 2019-09-21 20:32:44.354 debug statesDB connected
roomba.0 2019-09-21 20:32:44.326 debug objectDB connected
host.buanet-iobroker2_Neu_2019 2019-09-21 20:32:43.122 info instance system.adapter.roomba.0 started with pid 13832 -
@Mappy Starte mal dein System neu, wenn du kannst.
EADDRINUSEdeutet darauf hin, dass IP / Port belegt sind, weil irgendwie zu viel gestartet ist. -
Das EADDRINUSE kommt erst wenn ich es nochmal versuche.
Beim ersten Start gehts nur bis so weit:
Achso und neu gestartet habe ich das System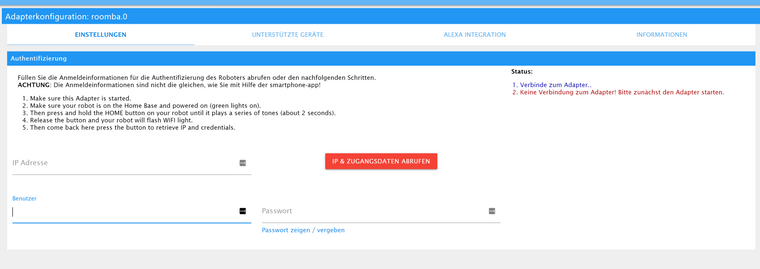
-
@Mappy Uploade mal den Adapter (im Menü unter Adapter das Icon mit dem Pfeil nach oben
Upload) -
@Zefau said in IRobot Roomba Adapter:
Upload
Na das bringt auch nichts.
Adapter ist schon jetzt da wenn ich ihn nochmal über die Konsole installiere aber verbinden mit dem Jet M6 kann ich es nicht.@Mappy sagte in IRobot Roomba Adapter:
Adapter ist schon jetzt da wenn ich ihn nochmal über die Konsole installiere aber verbinden mit dem Jet M6 kann ich es nicht.
Versuch mal über die Konsole, siehe https://github.com/koalazak/dorita980#how-to-get-your-usernameblid-and-password
Meine Adapter: https://zefau.github.io/iobroker/
-
@Mappy sagte in IRobot Roomba Adapter:
Adapter ist schon jetzt da wenn ich ihn nochmal über die Konsole installiere aber verbinden mit dem Jet M6 kann ich es nicht.
Versuch mal über die Konsole, siehe https://github.com/koalazak/dorita980#how-to-get-your-usernameblid-and-password
node ./bin/getpassword.js "192.168.168.128"
Make sure your robot is on the Home Base and powered on (green lights on). Then press and hold the HOME button on your robot until it plays a series of tones (about 2 seconds). Release the button and your robot will flash WIFI light.
Then press any key here...
/opt/iobroker/dorita980/bin/getpassword.js:120
process.stdin.setRawMode(true);
^TypeError: process.stdin.setRawMode is not a function
at Object.<anonymous> (/opt/iobroker/dorita980/bin/getpassword.js:120:17)
at Module._compile (module.js:653:30)
at Object.Module._extensions..js (module.js:664:10)
at Module.load (module.js:566:32)
at tryModuleLoad (module.js:506:12)
at Function.Module._load (module.js:498:3)
at Function.Module.runMain (module.js:694:10)
at startup (bootstrap_node.js:204:16)
at bootstrap_node.js:625:3
npm
ERR! code ELIFECYCLE
npm ERR! errno 1
npm
ERR! dorita980@3.1.4 getpassword:node ./bin/getpassword.js "192.168.168.128"
npm ERR! Exit status 1
npm
ERR!
npm ERR! Failed at the dorita980@3.1.4 getpassword script.
npm ERR! This is probably not a problem with npm. There is likely additional logging output above.npm ERR! A complete log of this run can be found in:
npm ERR! /home/iobroker/.npm/_logs/2019-09-22T13_09_28_515Z-debug.log
/opt/iobroker/dorita980$ -
node ./bin/getpassword.js "192.168.168.128"
Make sure your robot is on the Home Base and powered on (green lights on). Then press and hold the HOME button on your robot until it plays a series of tones (about 2 seconds). Release the button and your robot will flash WIFI light.
Then press any key here...
/opt/iobroker/dorita980/bin/getpassword.js:120
process.stdin.setRawMode(true);
^TypeError: process.stdin.setRawMode is not a function
at Object.<anonymous> (/opt/iobroker/dorita980/bin/getpassword.js:120:17)
at Module._compile (module.js:653:30)
at Object.Module._extensions..js (module.js:664:10)
at Module.load (module.js:566:32)
at tryModuleLoad (module.js:506:12)
at Function.Module._load (module.js:498:3)
at Function.Module.runMain (module.js:694:10)
at startup (bootstrap_node.js:204:16)
at bootstrap_node.js:625:3
npm
ERR! code ELIFECYCLE
npm ERR! errno 1
npm
ERR! dorita980@3.1.4 getpassword:node ./bin/getpassword.js "192.168.168.128"
npm ERR! Exit status 1
npm
ERR!
npm ERR! Failed at the dorita980@3.1.4 getpassword script.
npm ERR! This is probably not a problem with npm. There is likely additional logging output above.npm ERR! A complete log of this run can be found in:
npm ERR! /home/iobroker/.npm/_logs/2019-09-22T13_09_28_515Z-debug.log
/opt/iobroker/dorita980$ -
Dache ich muss da meine IP rein bekommen.
Beim Versuch das ganze nochmals auszuführen:
/opt/iobroker/dorita980$ npm install
npm
WARN ajv-keywords@2.1.1 requires a peer of ajv@^5.0.0 but none is installed. You must install peer dependencies yourself.
npm WARN eslint-plugin-react@6.8.0 requires a peer of eslint@^2.0.0 || ^3.0.0 but none is installed. You must install peer dependencies yourself.audited 1182 packages in 7.115s
found 2 vulnerabilities (1 low, 1 critical)
runnpm audit fixto fix them, ornpm auditfor details///////////////////////////////
/opt/iobroker/dorita980$ npm run getpassword <robotIP>
/bin/sh: 1: Syntax error: end of file unexpected
/opt/iobroker/dorita980$ -
Dache ich muss da meine IP rein bekommen.
Beim Versuch das ganze nochmals auszuführen:
/opt/iobroker/dorita980$ npm install
npm
WARN ajv-keywords@2.1.1 requires a peer of ajv@^5.0.0 but none is installed. You must install peer dependencies yourself.
npm WARN eslint-plugin-react@6.8.0 requires a peer of eslint@^2.0.0 || ^3.0.0 but none is installed. You must install peer dependencies yourself.audited 1182 packages in 7.115s
found 2 vulnerabilities (1 low, 1 critical)
runnpm audit fixto fix them, ornpm auditfor details///////////////////////////////
/opt/iobroker/dorita980$ npm run getpassword <robotIP>
/bin/sh: 1: Syntax error: end of file unexpected
/opt/iobroker/dorita980$@Mappy sagte in IRobot Roomba Adapter:
<robotIP>
Ist schon durch deine IP zu ersetzen. Mich wunderte nur, dass die Befehle, die du zuerst eingegeben hattest, so ganz anders aussahen.
Sollte es dann immer noch nicht gehen, mach ein Issue auf der Github Seite von dorita auf. Der Entwickler wird dir helfen können.
-
Hallo @Zefau erstmal vielen Dank für die Arbeit und den Adapter! Soweit funktioniert er auch bei mir und macht eigentlich auch seine Arbeit. Eigentlich, denn ich habe irgendwie einen kleinen Fehler bemerkt, zumindest ist dieser öfter bei mir reproduzierbar. Schicke ich meinen Roomba los über das Webinterface und will Ihn später wieder Andocken lassen, erhalte ich öfter mal vom Roomba gesagt: "Fehler 18, bitte öffnen sie die App". Dann muss ich Ihn einmal wieder kurz reinigen lassen und stoppen und dann zur Home Base schicken lassen. Dies wiederum funktioniert dann einwandfrei. Hat dies manchmal was damit zu tun das er einfach nur nicht erkennt wo die Station ist?
Habe jetzt gerade nochmal einen Probelauf gemacht, dieses mal hat er Ohne Probleme angedockt, aber mein Log Spuckt mir leider einen Fehler aus:
2019-10-13 14:08:39.352 - info: roomba.0 (11237) Roomba online. Connection established. 2019-10-13 14:08:43.933 - debug: roomba.0 (11237) Subscribed to states commands.start. 2019-10-13 14:08:43.934 - debug: roomba.0 (11237) Subscribed to states commands.stop. 2019-10-13 14:08:43.935 - debug: roomba.0 (11237) Subscribed to states commands.pause. 2019-10-13 14:08:43.936 - debug: roomba.0 (11237) Subscribed to states commands.resume. 2019-10-13 14:08:43.937 - debug: roomba.0 (11237) Subscribed to states commands.dock. 2019-10-13 14:09:58.342 - info: web.0 (10432) ==>Connected system.user.admin from ::ffff:192.168.178.24 2019-10-13 14:10:06.476 - debug: roomba.0 (11237) system.adapter.admin.0: logging false 2019-10-13 14:10:52.467 - info: web.0 (10432) ==>Connected system.user.admin from ::ffff:192.168.178.24 2019-10-13 14:10:52.690 - info: web.0 (10432) ==>Connected system.user.admin from ::ffff:192.168.178.24 2019-10-13 14:10:56.226 - info: web.0 (10432) <==Disconnect system.user.admin from ::ffff:192.168.178.24 roomba.0 2019-10-13 14:12:32.994 - info: web.0 (10432) <==Disconnect system.user.admin from ::ffff:192.168.178.24 roomba.0 2019-10-13 14:12:34.907 - info: web.0 (10432) <==Disconnect system.user.admin from ::ffff:192.168.178.24 roomba.0 2019-10-13 14:12:35.088 - info: web.0 (10432) ==>Connected system.user.admin from ::ffff:192.168.178.24 2019-10-13 14:12:39.352 - info: roomba.0 (11237) Triggered action -start- on Roomba. 2019-10-13 14:12:40.434 - info: roomba.0 (11237) Roomba has resumed a previous mission (#36). 2019-10-13 14:12:54.842 - info: roomba.0 (11237) Roomba has started a new mission (#37). 2019-10-13 14:13:18.519 - info: roomba.0 (11237) Triggered action -dock- on Roomba. 2019-10-13 14:13:22.386 - warn: roomba.0 (11237) Connection lost! Roomba offline. 2019-10-13 14:13:22.388 - info: roomba.0 (11237) Roomba Connection closed. 2019-10-13 14:13:22.388 - warn: roomba.0 (11237) Unknown error! Please see debug log for details. 2019-10-13 14:13:22.389 - debug: roomba.0 (11237) {} 2019-10-13 14:13:25.149 - info: roomba.0 (11237) Roomba online. Connection established.Kannst du damit was anfangen?!
Er verliert nach dem Kommando "Andocken" einfach kurz die Verbindung und versucht sich dann sofort wieder zu verbinden..
Edit:
Dies ist nun wieder mehrere Male passiert und wieder kamen mehrmals die Fehlermeldungen "Fehler 18, bitte öffnen sie die IRobot App".
Noch ein kleiner Beitrag: Scheinbar funktioniert das Docking aber wenn man Ihn erst den Stop befehl verpasst und daraufhin dann den Dock Befehl. -
Hi,
Ich habe den Roomba Adapter in Betrieb nehmen können.
Mit den dort angebotenen Datenpunkten kann ich meinen iRobot starten, stoppen und zum Dock zurück schicken.
Allerdings würde ich gerne auch die Preferencen steuern, um zum Beispiel die Kantenreinigung zu aktivieren.
Es funktioniert abernur in eine Richtung. Die Einstellungen werden im ioBroker angezeigt. Ich kann diese allerdings nicht vom iOBroker aus ändern.
Oder gibt es da ne Möglichkeit?Viele Grüße
Uwe -
So, neues Log, neues Glück:
Keine Fehler, schien alles normal durchzulaufen. Auch die Karte per Telegram zeigte gut die Abdeckung. Allerdings zwei Anmerkungen/Besonderheiten:
- Bei mir ist der Status docked nach wie vor invertiert.
- Mein Roomba macht täglich zwei Durchläufe (in der App ist da automatisch eingestellt). Er fährt seine Runde, irgendwann ist der Akku leer (so nach ziemlich genau 75min, also gegen 12:20 Uhr), er fährt dann zum Laden und da bekomme ich von iobroker dann die Karte und Fertigmeldung. Nach wiederrum 75 min fährt er ein zweites Mal seine Runde für ca eine Stunde und davon ist im Log nirgendwo was zu sehen.
In der App (die ich heute noch gar nicht bemüht habe, da Internet des Roomba eh aus), hat er das immer sauber angezeigt, also saugt gerade, ist zum Aufladen an der Station und fährt in ca. soundsoviel Minuten wieder los, bzw. ist unterwegs oder eben, ist für heute fertig.
Warum bekommt der Adapter vom zweiten Lauf nix mit, nichtmal, dass der Status docking (wenn auch falsch rum) sich eigentlich ändern müsste? Nach dem letzten Eintrag um 12:21 war nix mehr von roomba im Log, obwohl er nochmal unterwegs war.
Gruss, Jürgen
P.S.: Musste vom Log alle langen Blöcke bis auf einen löschen, da sonst Zeichenlimit pro Beitrag überschritten. Schienen aber alle ähnlich oder gleich.
-
Sorry, aber ich bin wieder weg vom Adapter und lasse es über die Irobot-App laufen. Via iobroker kamen leider nie Infos, wenn er sich mal festgefahren hatte. Auch kam ausser Behälter voll über iobroker asnsonsten nichts Brauchbares an. Zudem waren die Karten oft nur Bruchteile der tatsächlichen Strecke. Dass es nicht am roomba selbst liegt sehe ich daran, dass via App alles ankommt und auch die Karten immer den vollen gereinigten Bereich anzeigen. Und da ich über iobroker so keinen richtigen Nutzen außer "es geht" hatte, bin ich wieder zurück.

Als ich ihn bis vor ca. 2 Wochen noch laufen hatte war der Zustand allerdings meistens (zu 90%) invertiert, aber nicht immer. Eine Logik konnte ich da leider nicht feststellen.
Gruss, Jürgen -
-
@Zefau Ich habe seit Montag den iRobot 966. Das einrichten des Adapters ging ohne Probleme. Der Robi reagiert auf die Kommandos des Adapter und scheint die richtigen Daten zu liefern.
Einige Kleinigkeiten habe ich aber:
- Wie im Issue 28 beschrieben scheint der Status für docked "verdreht" zu sein.
EDIT: Scheinbar ist der Status IMMER auf true! - Bei der Anzeige der letzten Kommandos erscheint bei dateTime nur NaN (siebe Bild)

Soll ich dazu ein Issue erstellen? - Ist es irgendwie möglich das der Zeitplan der Reinigung anpassbar ist oder gibt das die API nicht her?
LG
Carsten - Wie im Issue 28 beschrieben scheint der Status für docked "verdreht" zu sein.
-
@Zefau Ich habe seit Montag den iRobot 966. Das einrichten des Adapters ging ohne Probleme. Der Robi reagiert auf die Kommandos des Adapter und scheint die richtigen Daten zu liefern.
Einige Kleinigkeiten habe ich aber:
- Wie im Issue 28 beschrieben scheint der Status für docked "verdreht" zu sein.
EDIT: Scheinbar ist der Status IMMER auf true! - Bei der Anzeige der letzten Kommandos erscheint bei dateTime nur NaN (siebe Bild)
Soll ich dazu ein Issue erstellen? - Ist es irgendwie möglich das der Zeitplan der Reinigung anpassbar ist oder gibt das die API nicht her?
LG
Carsten@CKMartens danke dir für das Feedback. Werde das bei Zeit im Adapter berücksichtigen.
- Wie im Issue 28 beschrieben scheint der Status für docked "verdreht" zu sein.
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden354
Online33.0k
Benutzer83.3k
Themen1.3m
Beiträge