

IRobot Roomba Adapter
-
Hi,
Also ich muss sagen der adapter läuft soweit echt gut.
Das mit dem docked status passt auch, das einzige waa mir aufgefallen ist das der roomba jetzt öfters disconnected.
Beispiel: ich lasse ein programm laufen, bei dem bei anwesenheit mit 60min Verzögerung der roomba gestartez werden soll, die lief super mit version 0.2, mit version 0.4 wird der befehl nicht ausgeführt, anbei die Meldung:
2019-01-15 15:20:52.279 - info: roomba.0 Triggered action -start- on Roomba.
2019-01-15 15:20:52.280 - warn: roomba.0 Roomba not online! Action not triggered.
Wie gesagt mit version 0.2 war alles gut :) `
Hallo zusammen,
das ist mir auch aufgefallen. Seid der neuen Version steht der Roomba öfter auf disconnected. In früheren Version war das nicht so. Bin allerdings noch nicht dazugekommen das genauer unter die Lupe zu nehmen.
Ansonsten aber ein echt klasse Adapter! Zumal ich glaube dass es einem iRobot echt schwer macht
VG
ThomasL
Gesendet von iPhone mit Tapatalk
-
Never tough a running System - aber nein, ich muss ja auf die Version 0.4.0 updaten.
Nun ist alles kaputt. Der Adapter funktioniert nicht mehr. Ich kann ihn nicht starten und er zeigt immer rot an.
Was ist da schief gelaufen?
! $ ./iobroker url "https://github.com/Zefau/ioBroker.roomba" –debug
! install https://github.com/Zefau/ioBroker.roomba/tarball/master
! npm install https://github.com/Zefau/ioBroker.roomba/tarball/master --production --save --prefix "C:/ioBroker" (System call)
! > canvas@2.3.1 install C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas
! > node-pre-gyp install --fallback-to-build
! node-pre-gyp
! WARN
! Using request for node-pre-gyp https download
! node-pre-gyp WARN Tried to download(404): https://github.com/node-gfx/node-canvas ... a32.tar.gz node-pre-gyp WARN Pre-built binaries not found for canvas@2.3.1 and node@8.13.0 (node-v57 ABI, unknown) (falling back to source compile with node-gyp)
! Warning: Missing input files:
! C:\GTK\bin\libpangoft2-1.0-0.dll
! C:\GTK\bin\zlib1.dll
! C:\GTK\bin\libintl-8.dll
! C:\GTK\bin\libgmodule-2.0-0.dll
! C:\GTK\bin\libglib-2.0-0.dll
! C:\GTK\bin\libexpat-1.dll
! C:\GTK\bin\libpng14-14.dll
! C:\GTK\bin\libcairo-2.dll
! C:\GTK\bin\libfontconfig-1.dll
! C:\GTK\bin\libgobject-2.0-0.dll
! C:\GTK\bin\libgthread-2.0-0.dll
! C:\GTK\bin\libpangocairo-1.0-0.dll
! C:\GTK\bin\libfreetype-6.dll
! C:\GTK\bin\libpango-1.0-0.dll
! C:\GTK\bin\libpangowin32-1.0-0.dll
! Die Projekte in dieser Projektmappe werden nacheinander erstellt. Um eine parallele Erstellung zu erm�glichen, m�ssen Sie den Schalter "/m" hinzuf�gen.
! Backend.cc
! ImageBackend.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\backend\backend.h(3): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\backend\Backend.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\backend\backend.h(3): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\backend\ImageBackend.cc) [C:\ioBro
! ker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! PdfBackend.cc
! SvgBackend.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\backend\backend.h(3): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\backend\SvgBackend.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\backend\backend.h(3): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\backend\PdfBackend.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! BMPParser.cc
! Backends.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\backend\backend.h(3): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\Backends.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! Canvas.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\backend\backend.h(3): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\Canvas.cc) [C:\ioBroker\node_modul
! es\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! CanvasGradient.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\bmp\bmpparser.cc(193): warning C4018: ">": Konflikt zwischen "signed" und "unsigned" [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\bmp\bmpparser.cc(208): warning C4018: ">": Konflikt zwischen "signed" und "unsigned" [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\bmp\bmpparser.cc(275): warning C4244: "=": Konvertierung von "T" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! with
! [
! T=uint32_t
! ]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\bmp\bmpparser.cc(276): warning C4244: "=": Konvertierung von "T" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! with
! [
! T=uint32_t
! ]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\bmp\bmpparser.cc(277): warning C4244: "=": Konvertierung von "T" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! with
! [
! T=uint32_t
! ]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\bmp\bmpparser.cc(278): warning C4244: "=": Konvertierung von "T" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! with
! [
! T=uint32_t
! ]
! CanvasPattern.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\canvaspattern.h(5): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\CanvasPattern.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! CanvasRenderingContext2d.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\canvasrenderingcontext2d.h(5): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\CanvasRenderingContext2d.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! closure.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\backend\backend.h(3): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\closure.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! color.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(164): warning C4244: "=": Konvertierung von "T" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! with
! [
! T=int
! ]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(558): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(557): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(556): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(555): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(571): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(570): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(569): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(585): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(584): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(583): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(582): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(598): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(597): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(596): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(642): warning C4244: "Argument": Konvertierung von "int" in "uint8_t", m�glicher Datenverlust [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\program files\microsoft visual studio\2017\buildtools\vc\tools\msvc\14.16.27023\include\algorithm(1443): warning C4244: "=": Konvertierung von "int" in "char", m�glicher Datenverlust (Quelldatei wird kompiliert ..\src\color.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\color.cc(725): note: Siehe Verweis auf die Instanziierung der gerade kompilierten Funktions-Vorlage "_OutIt std::transform<std::_string_iterator<std::_string_val<std::_simple_types<_ty>>>,std::_String_iterator<std::_string_val<std::_simple_types<_ty>>>,int(__cdecl *)(int)>(const _InIt,const _InIt,_OutIt,_Fn)".
! with
! [
! _OutIt=std::_String_iterator<std::_string_val<std::_simple_types<char>>>,
! _Ty=char,
! _InIt=std::_String_iterator<std::_string_val<std::_simple_types<char>>>,
! _Fn=int (__cdecl *)(int)
! ]
! Image.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\canvasgradient.h(7): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\CanvasGradient.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\image.h(5): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "cairo.h": No such file or directory (Quelldatei wird kompiliert ..\src\Image.cc) [C:\ioBroker\node_modules\iobroker
! .roomba\node_modules\canvas\build\canvas.vcxproj]
! ImageData.cc
! init.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\init.cc(4): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "pango/pango.h": No such file or directory [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! register_font.cc
! c:\iobroker\node_modules\iobroker.roomba\node_modules\canvas\src\register_font.h(3): fatal error C1083: Datei (Include) kann nicht ge�ffnet werden: "pango/pango.h": No such file or directory (Quelldatei wird kompiliert ..\src\register_font.cc) [C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\canvas.vcxproj]
! win_delay_load_hook.cc
! gyp
! ERR!
! build error
! gyp
! ERR! stack Error:C:\Program Files\Microsoft Visual Studio\2017\BuildTools\MSBuild\15.0\Bin\MSBuild.exefailed with exit code: 1
! gyp
! ERR!
! stack
! at ChildProcess.onExit (C:\Program Files\nodejs\node_modules\npm\node_modules\node-gyp\lib\build.js:262:23)
! gyp
! ERR!
! stack
! at emitTwo (events.js:126:13)
! gyp
! ERR!
! stack
! at ChildProcess.emit (events.js:214:7)
! gyp
! ERR!
! stack
! at Process.ChildProcess._handle.onexit (internal/child_process.js:198:12)
! gyp
! ERR!
! System
! Windows_NT 10.0.17763
! gyp
! ERR!
! command
! "C:\Program Files\nodejs\node.exe" "C:\Program Files\nodejs\node_modules\npm\node_modules\node-gyp\bin\node-gyp.js" "build" "–fallback-to-build" "--module=C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\Release\canvas.node" "--module_name=canvas" "--module_path=C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\Release" "--napi_version=3" "--node_abi_napi=napi" "--napi_build_version=0" "--node_napi_label=node-v57"
! gyp
! ERR!
! cwd
! C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas
! gyp
! ERR!
! node -v
! v8.13.0
! gyp
! ERR!
! node-gyp -v
! v3.8.0
! gyp
! ERR!
! not ok
! node-pre-gyp
! ERR!
! build error
! node-pre-gyp
! ERR!
! stack
! Error: Failed to execute 'C:\Program Files\nodejs\node.exe C:\Program Files\nodejs\node_modules\npm\node_modules\node-gyp\bin\node-gyp.js build --fallback-to-build --module=C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\Release\canvas.node --module_name=canvas --module_path=C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\Release --napi_version=3 --node_abi_napi=napi --napi_build_version=0 --node_napi_label=node-v57' (1)
! node-pre-gyp
! ERR!
! stack
! at ChildProcess. <anonymous>(C:\ioBroker\node_modules\iobroker.roomba\node_modules\node-pre-gyp\lib\util\compile.js:83:29)
! node-pre-gyp
! ERR!
! stack
! at emitTwo (events.js:126:13)
! node-pre-gyp
! ERR!
! stack
! at ChildProcess.emit (events.js:214:7)
! node-pre-gyp
! ERR!
! stack
! at maybeClose (internal/child_process.js:915:16)
! node-pre-gyp
! ERR!
! stack
! at Process.ChildProcess._handle.onexit (internal/child_process.js:209:5)
! node-pre-gyp
! ERR! System Windows_NT 10.0.17763node-pre-gyp ERR! command "C:\Program Files\nodejs\node.exe" "C:\ioBroker\node_modules\iobroker.roomba\node_modules\node-pre-gyp\bin\node-pre-gyp" "install" "--fallback-to-build"
! node-pre-gyp ERR! cwd C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas
! node-pre-gyp
! ERR!
! node -v
! v8.13.0
! node-pre-gyp
! ERR!
! node-pre-gyp -v
! v0.11.0
! node-pre-gyp
! ERR!
! not ok
! Failed to execute 'C:\Program Files\nodejs\node.exe C:\Program Files\nodejs\node_modules\npm\node_modules\node-gyp\bin\node-gyp.js build --fallback-to-build --module=C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\Release\canvas.node --module_name=canvas --module_path=C:\ioBroker\node_modules\iobroker.roomba\node_modules\canvas\build\Release --napi_version=3 --node_abi_napi=napi --napi_build_version=0 --node_napi_label=node-v57' (1)
! npm
! ERR! code ELIFECYCLEnpm
! ERR!
! errno
! 1
! npm
! ERR!
! canvas@2.3.1 install:node-pre-gyp install --fallback-to-buildnpm
! ERR! Exit status 1npm
! ERR!
! npm
! ERR!
! Failed at the canvas@2.3.1 install script.
! npm
! ERR!
! This is probably not a problem with npm. There is likely additional logging output above.
! npm ERR! A complete log of this run can be found in:npm ERR! C:\WINDOWS\system32\config\systemprofile\AppData\Roaming\npm-cache_logs\2019-01-19T11_38_11_298Z-debug.log
! process exited with code 0</anonymous></std::_string_val<std::_simple_types<char></std::_string_val<std::_simple_types<char></std::_string_val<std::_simple_types<_ty></std::_string_iterator<std::_string_val<std::_simple_types<_ty>Ich habe im GitHub auf diese FORK Dings geklickt und habe ich Roomba Adapter auch in meinem GitHub Account drin. Wie bekomme ich das wieder weg?
-
Ich hatte ja schon die 0.2.x Version und wollte über die Katze einfach nur "hochrüsten" - Muss ich trotzdem den ganzen Canvas Prozess nochmal machen?
-
OK, Live Karte brauche ich nicht - wie komme ich wieder zurück zur 0.2.x Version?
… hat sich erledigt .... das Update auf den 0.4.0 hat mir im nodes Ordner mal schön alle roomba Adapter Daten rausgelöscht. Habe sie dann von meinem Backup wieder rein kopiert und - LÄUFT.
-
Ich habe es noch nicht so ganz durchblickt,.. Teste nun schon länger die 0.4.0, läuft aber nicht sauber wie davor. Es scheint als würden die Missions nur bei manuellem Auslösen gespeichert, nicht beim (im Staubsauger gespeichertem) Zeitprogramm. Aktueller Status wird auch nur angezeigt, wenn der Sauger fährt, nicht im Dock. Darüber hinaus ist die Map spiegelverkehrt und unterscheidet sich gerne mal von der Fläche, welche in der Roomba IOS App (korrekt) dargestellt wird. Ist das nur bei mir so?
LG
-
Hi,
Also ich muss sagen der adapter läuft soweit echt gut.
Das mit dem docked status passt auch, das einzige waa mir aufgefallen ist das der roomba jetzt öfters disconnected.
Beispiel: ich lasse ein programm laufen, bei dem bei anwesenheit mit 60min Verzögerung der roomba gestartez werden soll, die lief super mit version 0.2, mit version 0.4 wird der befehl nicht ausgeführt, anbei die Meldung:
2019-01-15 15:20:52.279 - info: roomba.0 Triggered action -start- on Roomba.
2019-01-15 15:20:52.280 - warn: roomba.0 Roomba not online! Action not triggered.
Wie gesagt mit version 0.2 war alles gut :) `
Hallo Zefau,
hab genau das gleiche Problem. Hatte gesehen, dass sich inzwischen viel getan hat und ein Update von Version 0.2 auf die aktuelle 0.4 gefahren. Seit dem verliert der Adapter die Verbindung zum Roomba "Status _connected = false". Ich hatte mich so daran gewöhnt, dass ich Roomba nach Abwesenheit fahren lassen konnte. Seit dem Update fährt er aber nicht mehr los, da der Status _connected = false ausgibt. Adapter neu starten, dann läuft es wieder.
Also Workaround erstellt. Der Adapter wird jede Nacht neu gestartet. Leider hilft das nicht wirklich, da der Adapter sporadisch die Verbindung zum Roomba verliert.
Die Installation habe ich nach Deiner Anleitung durchgeführt und lief auch ohne Fehler durch.
Eingesetzt wird ein 980er Modell.
Jetzt wollte ich wieder runter zur 0.2. Das funktioniert leider auch nicht, da ich keine frühere Version installieren kann.
Ergebnis:
$ ./iobroker upgrade roomba@0.2.0 Adapter "roomba" is not in the repository and cannot be updated. process exited with code 0Gibt es mittlerweile eine Lösung für das Problem mit der Connectivity der 0.4? Wenn nein, wie komme ich am besten wieder zu 0.2?
Grüße,
Stefan
-
Ich habe es noch nicht so ganz durchblickt,.. Teste nun schon länger die 0.4.0, läuft aber nicht sauber wie davor. Es scheint als würden die Missions nur bei manuellem Auslösen gespeichert, nicht beim (im Staubsauger gespeichertem) Zeitprogramm. Aktueller Status wird auch nur angezeigt, wenn der Sauger fährt, nicht im Dock. Darüber hinaus ist die Map spiegelverkehrt und unterscheidet sich gerne mal von der Fläche, welche in der Roomba IOS App (korrekt) dargestellt wird. Ist das nur bei mir so?
LG `
Im Github findet sich nun die Version 0.4.1, die nun besser kennt, wenn eine Mission vorbei ist (Roomba schickt hier nicht immer den nötigen Befehl).
Mit dem Zeitprogramm hat es aber in jedem Fall nichts zu tun. Das Zeitprogramm steuert den Start des Roomba, weiß aber nicht, wann dieser eine Mission fertig hat.
An der Funktionalität der Karte arbeite ich noch, insofern benötige ich hier euer konstruktives(!) Feedback.
Ist die Karte immer spiegelverkehrt? Dann ist das einfach zu korrigieren.
Inwiefern unterscheidet sich die Karte von der ios Karte?
-
Seit dem verliert der Adapter die Verbindung zum Roomba "Status _connected = false". Ich hatte mich so daran gewöhnt, dass ich Roomba nach Abwesenheit fahren lassen konnte. Seit dem Update fährt er aber nicht mehr los, da der Status _connected = false ausgibt. `
Sollte mit der Version 0.4.1 nun wieder funktionieren. Bitte testen.
-
Sollte mit der Version 0.4.1 nun wieder funktionieren. Bitte testen. `
Danke für Deine Mühe. Werde ich die Tage testen.
Grüße,
Stefan
Gesendet von iPhone mit Tapatalk
-
Sollte mit der Version 0.4.1 nun wieder funktionieren. Bitte testen. `
Danke für Deine Mühe. Werde ich die Tage testen.
Grüße,
Stefan
Gesendet von iPhone mit Tapatalk `
Dem Dank schließe ich mich gern an und werde auch die nächsten Tage testen.Viele Grüße
Thomas
Gesendet von iPhone mit Tapatalk
-
Hi,
seit dem update auf Version 0.4.1 bekomme ich folgenden Fehler:
host.Iobroker 2019-02-04 21:27:15.436 info Restart adapter system.adapter.roomba.0 because enabled
host.Iobroker 2019-02-04 21:27:15.436 error instance system.adapter.roomba.0 terminated with code 0 (OK)
host.Iobroker 2019-02-04 21:27:15.436 error Caught by controller[0]: at Timer.listOnTimeout (timers.js:290:5)
host.Iobroker 2019-02-04 21:27:15.436 error Caught by controller[0]: at tryOnTimeout (timers.js:323:5)
host.Iobroker 2019-02-04 21:27:15.435 error Caught by controller[0]: at ontimeout (timers.js:498:11)
host.Iobroker 2019-02-04 21:27:15.435 error Caught by controller[0]: at Timeout.setInterval [as _onTimeout] (/opt/iobroker/node_modules/iobroker.roomba/node_modules/dorita980/lib/v2/local.js:38:16)
host.Iobroker 2019-02-04 21:27:15.435 error Caught by controller[0]: at MqttClient.emit (events.js:211:7)
host.Iobroker 2019-02-04 21:27:15.434 error Caught by controller[0]: at emitOne (events.js:116:13)
host.Iobroker 2019-02-04 21:27:15.434 error Caught by controller[0]: at MqttClient. <anonymous>(/opt/iobroker/node_modules/iobroker.roomba/main.js:310:17)
host.Iobroker 2019-02-04 21:27:15.433 error Caught by controller[0]: TypeError: Cannot read property 'time' of null
roomba.0 2019-02-04 21:27:14.553 info Roomba online. Connection established.
roomba.0 2019-02-04 21:27:12.190 info Connecting to Roomba..
roomba.0 2019-02-04 21:27:12.189 info starting. Version 0.4.1 in /opt/iobroker/node_modules/iobroker.roomba, node: v8.15.0
habe den Adapter schon komplett deinstalliert und neu installiert, leider ohne erfolg.
Wenn du eine Idee hast :) ich wäre für jeden tipp dankbar
"UPDATE"
habe jetzt ein downgrade auf Version 0.4.0 gemacht, jetzt läuft alles wieder mit dem Workaround den Adapter nacht um 01:00 Uhr einmal neustarten zu lassen.
Gruss</anonymous>
-
hi,
habe genau das selbe problem mit dem 0.4.0 adapter..
sobald ich meinen 980er starte und ihn wieder zurück zur home base fahre wird kein erneuter befehl mehr gesendet.
roomba.0 Roomba not online! Action not triggered
Erst nach einem neustart des adapters funktioniert er wieder für start und home.
-
Hallo zusammen,
es gibt eine neue Version des Adapters, die nun auch Karten der Missionen anlegt.
https://ibb.co/9gcWhjm ~~Die Ansicht kann über Interfaces aufgerufen werden (rechter Button):
https://imgbb.com/ ~~Natürlich ist eine Einbindung in ioBroker.vis mittels des States roomba.0.missions.current.mapHTML möglich.
Der Adapter kann von Github installiert werden.
Bitte vorher unbedingt die vorherige Version 0.2.3 deinstallieren, bevor 0.3.0 installiert wird.
iobroker del roombaDanach zunächst die Grafik-Libraries installieren, damit die Karte erstellt werden kann:
sudo apt-get install build-essential libcairo2-dev libpango1.0-dev libjpeg-dev libgif-dev librsvg2-devDann den Adapter von Github installieren
iobroker url https://github.com/Zefau/ioBroker.roombasowie admin panel hochladen
iobroker upload roombaIst eine frühe Version, daher wird es noch zu Fehlern kommen. Über Tester würde ich mich sehr freuen.
Danke und viele Grüße
Zefau~~~~
Hi,
hab habe seit ein paar tagen das update auf version 0.4.3 gemacht (0.4.1 wollte einfach nicht mit mir spielen :) )
es funktioniert auch soweit alles, allerdings ist mir aufgefallen das die stati nicht aktualisiert werden, dies passiert nur wenn ich die instanz neustarte.
-
Hey,
ich hab nun das Problem das der Sauger sich über die Commands Steuern lässt, aber er zeichnet nix auf.
@Gonzo0815 said in IRobot Roomba Adapter:
Hey,
ich hab nun das Problem das der Sauger sich über die Commands Steuern lässt, aber er zeichnet nix auf.
Jemand eine Idee ?
-
Hallo zusammen,
ich besitze seit kurzem einen Roomba I7
Erstmal ein dickes Lob für so einen coolen Adapter

Adapter funktioniert soweit sehr gut, einziges Problem ist das die Map bei mir auch verkehrt dargestellt wird. Für eine richtige Ansicht müsste ich die Map um 180° drehen und dann horizontal spiegeln.
Hat jemand eine Idee wie man das realisieren kann ?
-
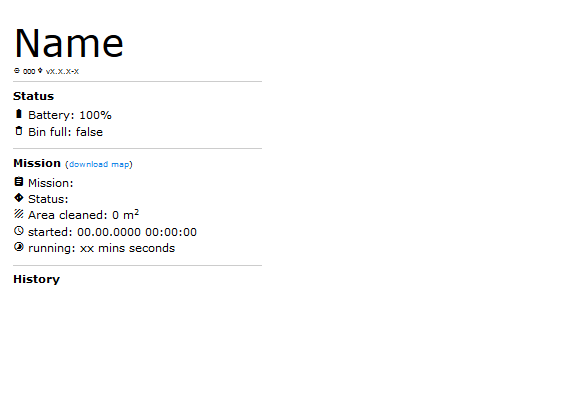
Ich habe mir an Anlehnung an verschiedene VIS Bilder hier aus dem Forum und aus dem Web mal folgendes Bild gebastelt. Das vom Xiamoi (Eve) funktioniert bereits und bietet MIR eigentlich alle Informatonen die ich so benötige. Für Leute die mit Wochenplanern arbeiten bietet sich vielleicht noch die Darstellung der programmierten Saugzeiten an, so wie das bei meinem Mähroboter auch möglich ist - das muss ich aber da noch einfügen.
Ich finde man sollte nicht zuviel SchnickSchnack ausgeben - ist aber nur meine Meinung

@JB_Sullivan sehr schönes VIS.
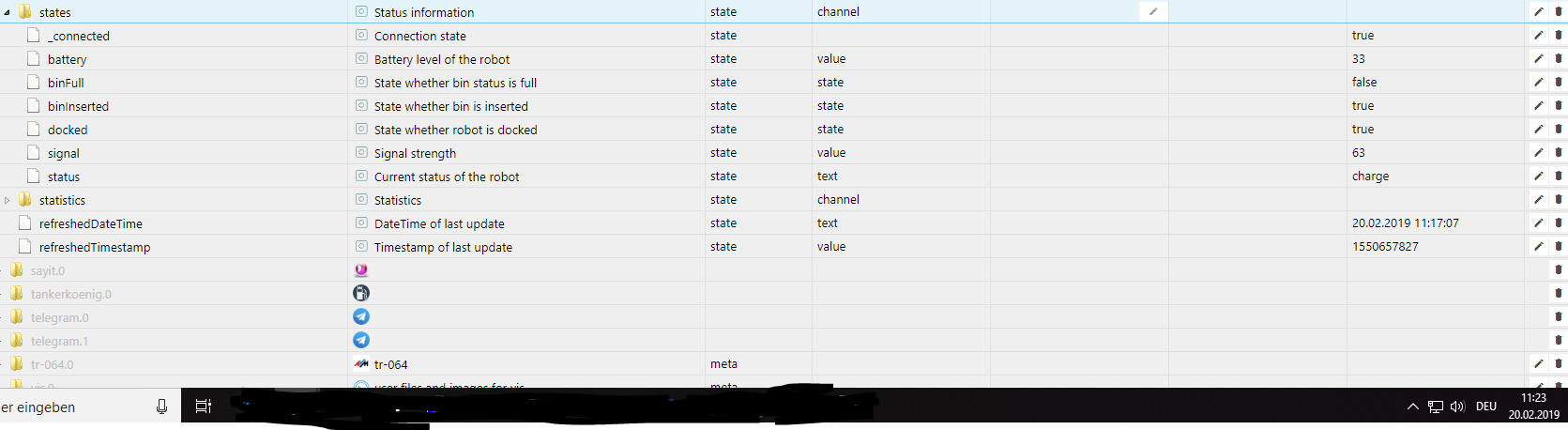
Ich habe mir gestern den Roomba 966 zugelegt und habe mir den iRobot-Adapter installiert.
Dieser zeigt mir auch (fast) alles an, was bei dir zu sehen ist.
Nur kann ich leider den Verbrauch der Bürsten, unter den Objekten, nicht finden.Wie hast du diese Infos eingebunden?
Vielen Dank
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden203
Online33.0k
Benutzer83.3k
Themen1.3m
Beiträge