Скрипт для счётчика
-
Обновил информацию по статье на твоем Блоге, но не дружу с UART, как это выглядит для домохозяек….
-
Таааак…. А вот с этого места поподробнее... Если я правильно понимаю, одна сборка снимает показания и передает их другой сборке, которая по MQTT их публикует.... Эт получается надо пару ардуин вешать?? А как обмен между ними организован??
Сечас я использую одну 2560 для обработки температуры, датчиков освещения и контроля за насосом и промсетью, а на второй 2560 пытаюсь сделать счетчик КВт.....
и возможно на нее же посажу управление вентиляцией и освещением... `
Импульсы считает отдельный МК, сделано для того чтобы не пропускались импульсы и ни на что другое не влияло. Выдает данные на уарт, второй МК принимает эти данные и шлёт уже по mqtt.Возьми для счётчика например ардуиной про мини и ей считай только импульсы. А вся остальная логика - mqtt, датчики и ТД и тп
-
Попробовал залить скетч Count в 2560…. Результат отрицательный, в сериал ни чего не летит.... ПРверял Монитором порта от IDE Arduino 1.6.13.
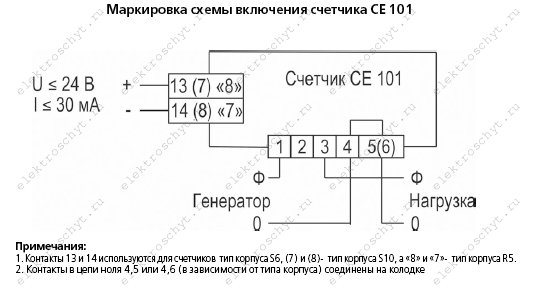
Я правильно понимаю что один выход счетчика подключаем к А0, второй к GND или я не прав.
Вот типовая схема счетчика
1308_watermarked-shema-se101.png.jpg -
Попробовал залить скетч Count в 2560…. Результат отрицательный, в сериал ни чего не летит.... ПРверял Монитором порта от IDE Arduino 1.6.13.
Я правильно понимаю что один выход счетчика подключаем к А0, второй к GND или я не прав.
Вот типовая схема счетчика `
Нет, вход идет на вход прерывания INT0. -
Все, сдаюсь. Ткните носом - куда подключать выводы от счетчика…. INT0- это какая нога(pin) на 2560, 21? или я уже ни чего не понимаю
И где в скетче это прописано....
Считывание идет, как я вижу со 2 pin.....
! ````
#include <eeprom.h>
#include <avr wdt.h="">
#include <avr io.h="">
#include <avr interrupt.h="">
! #define PWR_CTRL A0
#define CNT_ADR 10
#define PWR_ADR 20
#define IMP_ADR 30
#define BNC_ADR 40
#define NUM_ADR 50
#define CHK_ADR 100
! volatile unsigned long cnt = 1 ;
volatile unsigned long prev_cnt = 0;
volatile unsigned long pwr = 0;
volatile unsigned long prev_pwr = 1;
unsigned long chk = 0;
int num = 3200;
int imp = 0;
int amp = 0;
int prev_amp = 0;
int bounce = 1;
unsigned long prev;
volatile unsigned long prev_millis;
volatile unsigned long cur_tmS = millis();
volatile unsigned long pre_tmS = cur_tmS;
volatile float diffS = 0;
volatile unsigned long tm_diffS = 0;
bool err = false;
String cmd = "";
bool strComplete = false;
! //////////////////////////////////////////////////////////////////////////////////////////////////////////////
void setup() {
MCUSR = 0;
wdt_disable();
Serial.begin(115200);
cmd.reserve(200);
Serial.print("Start");
pinMode(2, INPUT);
digitalWrite(2, HIGH);
delay(200);
if (EEPROM.read(1) != 88) { //Если первый запуск
EEPROM.write(1, 88);
} else {
chk = EEPROMReadLong(CHK_ADR);
cnt = EEPROMReadLong(CNT_ADR);
pwr = EEPROMReadLong(PWR_ADR);
imp = EEPROMReadInt(IMP_ADR);
num = EEPROMReadInt(NUM_ADR);
bounce = EEPROMReadInt(BNC_ADR);
if (chk != cnt + imp + bounce) {
err = true;
}
}
wdt_enable(WDTO_8S);
attachInterrupt(0, count, FALLING);
}
! void loop() {
wdt_reset();
if (analogRead(PWR_CTRL) < 1000) {
save();
}
! if (strComplete) {
// Serial.println(inputString);
if (cmd.substring(0, 1) == "S") {
if (cmd.substring(1, 2) == "N") {
num = cmd.substring(cmd.lastIndexOf('N') + 1).toInt();
}
else if (cmd.substring(1, 2) == "S") {
save();
}
else if (cmd.substring(1, 2) == "C") {
cnt = atol(cmd.substring(cmd.lastIndexOf('C') + 1).c_str());
}
else if (cmd.substring(1, 2) == "B") {
bounce = cmd.substring(cmd.lastIndexOf('B') + 1).toInt();
}
save();
}
cmd = "";
strComplete = false;
}
! tm_diffS = cur_tmS - pre_tmS;
diffS = (float(tm_diffS) / 1000);
pwr = 3600000 / (num * diffS);
if ((cnt != prev_cnt || amp != prev_amp || pwr >= (prev_pwr + 10) || pwr <= (prev_pwr - 10)) && pwr > 0 && millis() - 2000 > prev) {
prev = millis();
Serial.print(cnt);
Serial.print(";");
if (pwr > (prev_pwr + 4000)) {
Serial.print(prev_pwr);
} else {
Serial.print(pwr);
}
Serial.print(";");
Serial.print(amp);
Serial.print(";");
Serial.print(bounce);
Serial.print(";");
Serial.print(num);
Serial.print(";");
Serial.print(err);
Serial.print('\n');
}
prev_cnt = cnt;
prev_amp = amp;
prev_pwr = pwr;
}
! void count() {
detachInterrupt(0);
if (millis() - bounce > prev_millis) {
prev_millis = millis();
pre_tmS = cur_tmS;
cur_tmS = millis();
imp++;
if (imp >= num) {
imp = 0;
cnt++;
}
}
attachInterrupt(0, count, FALLING);
}
! void serialEvent() {
while (Serial.available() > 0) {
char inChar = (char)Serial.read();
cmd += inChar;
if (inChar == '\n') {
strComplete = true;
}
}
}
! void save() {
chk = cnt + imp + bounce;
EEPROMWriteLong(CNT_ADR, cnt);
EEPROMWriteLong(PWR_ADR, pwr);
EEPROMWriteInt(IMP_ADR, imp);
EEPROMWriteInt(NUM_ADR, num);
EEPROMWriteInt(BNC_ADR, bounce);
EEPROMWriteLong(CHK_ADR, chk);
}
! void EEPROMWriteLong(int p_address, unsigned long p_value) {
byte four = (p_value & 0xFF);
byte three = ((p_value >>") & 0xFF);
& 0xFF);
byte two = ((p_value >> 16) & 0xFF);
byte one = ((p_value >> 24) & 0xFF);
EEPROM.write(p_address, four);
EEPROM.write(p_address + 1, three);
EEPROM.write(p_address + 2, two);
EEPROM.write(p_address + 3, one);
}
! unsigned long EEPROMReadLong(int p_address) {
long four = EEPROM.read(p_address);
long three = EEPROM.read(p_address + 1);
long two = EEPROM.read(p_address + 2);
long one = EEPROM.read(p_address + 3);
return ((four << 0) & 0xFF) + ((three << & 0xFFFF) + ((two << 16) & 0xFFFFFF) + ((one << 24) & 0xFFFFFFFF);
}
! void EEPROMWriteInt(int p_address, int p_value) {
byte lowByte = ((p_value >> 0) & 0xFF);
byte highByte = ((p_value >> & 0xFF);
EEPROM.write(p_address, lowByte);
EEPROM.write(p_address + 1, highByte);
}
unsigned int EEPROMReadInt(int p_address) {
byte lowByte = EEPROM.read(p_address);
byte highByte = EEPROM.read(p_address + 1);
return ((lowByte << 0) & 0xFF) + ((highByte << & 0xFF00);
}</avr></avr></avr></eeprom.h> -
Хотя…. отключив логику и перелистав ДатаШИТ на 2560, понимаю что INT0 - это pin2 (RX0)
и тогда, о чудо.... я увидел вот это....
! ````
4278188031;4294427971;0;-5;-5;1
4278188031;4294427161;0;-5;-5;1
4278188031;4294414725;0;-5;-5;1
4278188031;4294429983;0;-5;-5;1
4278188031;4294433568;0;-5;-5;1
4278188031;4294428374;0;-5;-5;1
4278188031;4294415995;0;-5;-5;1
4278188031;4294427971;0;-5;-5;1
4278188031;4294428777;0;-5;-5;1
4278188031;4294427161;0;-5;-5;1
4278188031;4294413876;0;-5;-5;1
4278188031;4294422667;0;-5;-5;1
4278188031;4294426350;0;-5;-5;1
4278188031;4294425128;0;-5;-5;1
4278188031;4294426350;0;-5;-5;1Это то что я ищу??? -
Хотя…. отключив логику и перелистав ДатаШИТ на 2560, понимаю что INT0 - это pin2 (RX0)
и тогда, о чудо.... я увидел вот это....
! ````
4278188031;4294427971;0;-5;-5;1
4278188031;4294427161;0;-5;-5;1
4278188031;4294414725;0;-5;-5;1
4278188031;4294429983;0;-5;-5;1
4278188031;4294433568;0;-5;-5;1
4278188031;4294428374;0;-5;-5;1
4278188031;4294415995;0;-5;-5;1
4278188031;4294427971;0;-5;-5;1
4278188031;4294428777;0;-5;-5;1
4278188031;4294427161;0;-5;-5;1
4278188031;4294413876;0;-5;-5;1
4278188031;4294422667;0;-5;-5;1
4278188031;4294426350;0;-5;-5;1
4278188031;4294425128;0;-5;-5;1
4278188031;4294426350;0;-5;-5;1Это то что я ищу??? ` да, только надо конфиг задать через уарт -
как? И еще вопрос, просто хочется оперативно посмотреть результаты….
Как объединить этот код
! ```
`#include <spi.h> // Ethernet shield
#include <ethernet.h> // Ethernet shield
#include <pubsubclient.h> // MQTT
#include <servo.h>
#include <dht.h>
#include <onewire.h>
#include <dallastemperature.h>
Servo servo;
! byte mac[] = { 0xC1, 0x7C, 0x38, 0x41, 0x89, 0x15 };
byte server[] = { 192, 168, 10, 15 }; //IP Брокера
byte ip[] = { 192, 168, 10, 88 }; //IP Клиента (Arduino)
! ////////////////////////////////////////////////////////////////////////////
void callback(char* topic, byte* payload, unsigned int length) {
payload[length] = '\0';
// Serial.print(topic);
// Serial.print("=");
String strTopic = String(topic);
String strPayload = String((char*)payload);
// Serial.println(strPayload);
callback_iobroker(strTopic, strPayload);
}
! EthernetClient ethClient;
PubSubClient client(server, 1883, callback, ethClient);
#define id_connect "myhome-temp"
#define id_connect "myhome-status"
#define Prefix_subscribe "myhome/Temp/"
#define Prefix_subscribe "myhome/Status/"
! ///////////////Объявляем порты ввода-вывода
#define ServoPin 3 //Порт к которому подключен сервопривод
! const int start_DI_pin []= {2, 4, 5}; // Порты Ввода
int n_DI_pin = sizeof(start_DI_pin) / sizeof(start_DI_pin[0])-1; //Вычисляем длинну массива
! const int start_DO_pin []= {6, 7}; //Порты Вывода
int n_DO_pin = sizeof(start_DO_pin) / sizeof(start_DO_pin[0])-1; //Вычисляем длинну массива
! int DI[] = {0, 0, 0};
int old_DI[] = {0, 0, 0};
! ///////////////////////////Переменные для работы с освещением//////////////////////////////////////
int ServoAngle = 100; //Угол сервопривода при включении
int flag = 0;
int flag2 = 0;
int pause = 0;
! //------------------------------------------- Sensors -------------------------------------------//
const int MQ7_Pin = A0; // Куда подключили MQ7
//int MQ7Value = 0;
int MQ7Value = analogRead(MQ7_Pin);const int foto_Pin = A1; // устанавливаем входную ногу для Фоторезистора
//unsigned int fotoValue = 0; // цифровое значение фоторезистора
unsigned int fotoValue = analogRead(foto_Pin);! #define ONE_WIRE_BUS 8
//#define TEMPERATURE_PRECISION 9
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature DS_sensors(&oneWire);
// 28 80 E9 3A 04 00 00 10
//T0:28 88 AD D7 02 00 00 42
//T1:28 14 A5 D7 02 00 00 B0
//T2:28 72 26 7B 04 00 00 2E
//T3:28 CA 1A 3B 04 00 00 CD
//T4:28 E6 D5 D7 02 00 00 C1
//T5:28 16 B4 7A 04 00 00 8A
//T6:28 2B 86 D7 02 00 00 CF
//T7:28 AB 9D D7 02 00 00 29
DeviceAddress addr_T1 = { 0x28, 0x80, 0xE9, 0x3A, 0x4, 0x0, 0x0, 0x10 };//кладовка
DeviceAddress addr_T2 = { 0x28, 0x88, 0xAD, 0xD7, 0x2, 0x0, 0x0, 0x42 };//кухня
DeviceAddress addr_T3 = { 0x28, 0x14, 0xA5, 0xD7, 0x2, 0x0, 0x0, 0xB0 };//детская
DeviceAddress addr_T4 = { 0x28, 0x72, 0x26, 0x7B, 0x4, 0x0, 0x0, 0x2E };//гараж
DeviceAddress addr_T5 = { 0x28, 0xCA, 0x1A, 0x3B, 0x4, 0x0, 0x0, 0xCD };//ванная
DeviceAddress addr_T6 = { 0x28, 0xE6, 0xD5, 0xD7, 0x2, 0x0, 0x0, 0xC1 };//улица
DeviceAddress addr_T7 = { 0x28, 0x16, 0xB4, 0x7A, 0x4, 0x0, 0x0, 0x8A };//спальня2
DeviceAddress addr_T8 = { 0x28, 0x2B, 0x86, 0xD7, 0x2, 0x0, 0x0, 0xCF };//зал
DeviceAddress addr_T9 = { 0x28, 0xAB, 0x9D, 0xD7, 0x2, 0x0, 0x0, 0x29 };//мансарда
! float T1=0;
float T2=0;
float T3=0;
float T4=0;
float T5=0;
float T6=0;
float T7=0;
float T8=0;
float T9=0;
! //dht DHT;
//#define DHT22_PIN 9
//float Hout = 0;
//float Tout = 0;
! ////////////////////////////////////////////////////////////////////////////
//void callback(char* topic, byte* payload, unsigned int length) {
// payload[length] = '\0';
// Serial.print(topic);
// Serial.print("=");
// String strTopic = String(topic);
// String strPayload = String((char*)payload);
// Serial.println(strPayload);
// callback_iobroker(strTopic, strPayload);
//}
////////////////////////////////////////////////////////////////////////////
void setup() {
Serial.begin(57600);
Serial.println("start");Serial.print("Locating devices...");
DS_sensors.begin();
Serial.print("Found ");
Serial.print(DS_sensors.getDeviceCount(), DEC);
Serial.println(" devices.");! // report parasite power requirements
Serial.print("Parasite power is: ");
if (DS_sensors.isParasitePowerMode()) Serial.println("ON");
else Serial.println("OFF");//Объявляем порты Digital inputs/outputsfor(int i=0 ;i<=n_DI_pin; i++) { pinMode (start_DI_pin [i], INPUT); }
digitalWrite(5, HIGH); //Насос скважины
digitalWrite(4, HIGH); //Электрика
for(int i=0 ;i<=n_DO_pin; i++) { pinMode (start_DO_pin [i], OUTPUT); }! Ethernet.begin(mac, ip);
if (client.connect(id_connect)) {
getSensors();
control();
//client.publish("myhome/Kitchen/Change_Counter", "0");
//client.publish("myhome/Kitchen/Temp_room", "0");
//client.publish("myhome/Kitchen/Humidity_room", "0");
client.publish("myhome/Temp/Kladovka", "0");
client.publish("myhome/Temp/Kitchen", "0");
client.publish("myhome/Temp/Detskaya", "0");
client.publish("myhome/Temp/Garage", "0");
client.publish("myhome/Temp/Street", "0");
client.publish("myhome/Temp/Spalnya2", "0");
client.publish("myhome/Temp/Zal", "0");
client.publish("myhome/Temp/Mansarda", "0");
client.publish("myhome/Temp/Vannaya", "0");//client.publish("myhome/Kitchen/Lux", "0"); //client.publish("myhome/Kitchen/Servo", "0"); client.publish("myhome/Temp/MQ7", "0"); client.publish("myhome/Status/Power", "0"); client.publish("myhome/Status/Pompe", "0"); client.subscribe("myhome/Temp/#"); client.subscribe("myhome/Status/#");}
}
/////////////////////////////////////////////////////////////////////////
void loop() {
client.loop();
control();
getSensors();
if (!client.connected()) {
if (client.connect(id_connect)) {
control();
getSensors();
client.subscribe("myhome/Temp/#");
}
}
}</dallastemperature.h></onewire.h></dht.h></servo.h></pubsubclient.h></ethernet.h></spi.h>`! function.ino
`[code]//--------------------------------- Functions ---------------------------------//
/////////////////////////////////От Брокера//////////////////////////////////////////////
void callback_iobroker(String strTopic, String strPayload){
if (strTopic == "myhome/Kitchen/Servo"){
ServoAngle=strPayload.toInt();
if (ServoAngle >= 0 && ServoAngle <= 255){
servo.attach(ServoPin);
//delay(200); //ждем 2 секунды
servo.write(ServoAngle); //ставим вал под 0
delay(1000); //ждем 2 секунды
//client.publish("myhome/Kitchen/Servo", b);
servo.detach();
}
}
}
! ////////////////////////////////////Брокеру/////////////////////////////////////
void control(){if(digitalRead(5)==HIGH && flag==0) { //если насос включен client.publish("myhome/Status/Pompe", "1"); flag=1; } if(digitalRead(5)==LOW && flag==1){//если насос выключен client.publish("myhome/Status/Pompe", "0"); flag=0;//обнуляем переменную flag } if(digitalRead(4)==HIGH && flag2==0) { // Если электрика есть client.publish("myhome/Status/Power", "1"); flag2=1; } if(digitalRead(4)==LOW && flag2==1){// Если эректрики нет client.publish("myhome/Status/Power", "0"); flag2=0;//обнуляем переменную flag }}
///////////////////////////////Данные сенсоров////////////////////////////////////! void getSensors () {
! MQ7Value = analogRead(MQ7_Pin);
fotoValue = analogRead(foto_Pin); // считываем значение с фоторезистора
// ServoAngle = analogRead(2);
! //Обработка данных датчика DHT22. Подключение к порту цифровому P9 Arduino
//Глобальные переменные Hout и Tout типа флоат - влажность (%) и температура (град. С)
// if (DHT.read22(DHT22_PIN)== DHTLIB_OK) {
// Hout = DHT.humidity;
// Tout = DHT.temperature;
// }
// if (Hout == 0 || Tout == 0){
// delay (1000);
// if (DHT.read22(DHT22_PIN)== DHTLIB_OK) {
// Hout = DHT.humidity;
// Tout = DHT.temperature;
// }
// }
//Обработка данных цифровых датчиков температуры типа DS18B20.
//Шина 1-Wire на цифровой пин P8 Arduino.
//Подключено 2 датчика температуры, адреса задаются в секции глобальных констант "Sensors"
//Три значение температуры T1, T2, типа float (град. С).
DS_sensors.setResolution(addr_T1, 9);
DS_sensors.setResolution(addr_T2, 9);
DS_sensors.setResolution(addr_T3, 9);
DS_sensors.setResolution(addr_T4, 9);
DS_sensors.setResolution(addr_T5, 9);
DS_sensors.setResolution(addr_T6, 9);
DS_sensors.setResolution(addr_T7, 9);
DS_sensors.setResolution(addr_T8, 9);
DS_sensors.setResolution(addr_T9, 9);float T1 = DS_sensors.getTempC(addr_T1);
float T2 = DS_sensors.getTempC(addr_T2);
float T3 = DS_sensors.getTempC(addr_T3);
float T4 = DS_sensors.getTempC(addr_T4);
float T5 = DS_sensors.getTempC(addr_T5);
float T6 = DS_sensors.getTempC(addr_T6);
float T7 = DS_sensors.getTempC(addr_T7);
float T8 = DS_sensors.getTempC(addr_T8);
float T9 = DS_sensors.getTempC(addr_T9);DS_sensors.requestTemperatures();
//Serial.print(DS_sensors.getResolution(addr_T1), DEC);
Serial.println();
Serial.print("Temp T1 ");
");
Serial.print(T1);
Serial.println();! Serial.println();
Serial.print("Temp T2 ");
Serial.print(T2);
Serial.println();
//
Serial.println();
Serial.print("Temp T3 ");
Serial.print(T3);
Serial.println();
//
Serial.println();
Serial.print("Temp T4 ");
Serial.print(T4);
Serial.println();
//
Serial.println();
Serial.print("Temp T5 ");
Serial.print(T5);
Serial.println();
//
Serial.println();
Serial.print("Temp T6 ");
Serial.print(T6);
Serial.println();
//
Serial.println();
Serial.print("Temp T7 ");
Serial.print(T7);
Serial.println();
//
Serial.println();
Serial.print("Temp T8 ");
Serial.print(T8);
Serial.println();
//
Serial.println();
Serial.print("Temp T9 ");
Serial.print(T9);
Serial.println();
//
///////////////////////Паблик данных сенсоров////////////////////////
if (pause == 50 || pause == 0){char b[5];
// String char_Hout = String(Hout);
// char_Hout.toCharArray(b,5);
// client.publish("myhome/Kitchen/Humidity_room", b);// String char_Tout = String(Tout);
// char_Tout.toCharArray(b,5);
// client.publish("myhome/Kitchen/Temp_room", b);String char_T1 = String(T1); char_T1.toCharArray(b,5); client.publish("myhome/Temp/Kladovka", b); String char_T2 = String(T2); char_T2.toCharArray(b,5); client.publish("myhome/Temp/Kitchen", b); String char_T3 = String(T3); char_T3.toCharArray(b,5); client.publish("myhome/Temp/Detskaya", b); String char_T4 = String(T4); char_T4.toCharArray(b,5); client.publish("myhome/Temp/Garage", b); String char_T5 = String(T5); char_T5.toCharArray(b,5); client.publish("myhome/Temp/Vannaya", b); String char_T6 = String(T6); char_T6.toCharArray(b,5); client.publish("myhome/Temp/Street", b); String char_T7 = String(T7); char_T7.toCharArray(b,5); client.publish("myhome/Temp/Spalnya2", b); String char_T8 = String(T8); char_T8.toCharArray(b,5); client.publish("myhome/Temp/Zal", b); String char_T9 = String(T9); char_T9.toCharArray(b,5); client.publish("myhome/Temp/Mansarda", b); //Serial.println(T1); String char_fotoValue = String(fotoValue); char_fotoValue.toCharArray(b,4); client.publish("myhome/Kitchen/Lux", b);String char_ServoAngle = String(ServoAngle);
char_ServoAngle.toCharArray(b,4);
client.publish("myhome/Kitchen/Servo", b);String char_MQ7Value = String(MQ7Value); char_MQ7Value.toCharArray(b,4); client.publish("myhome/Temp/MQ7", b); pause = 1;}
else pause++;
}! [/code]
и код вот этот... ! >! ~~[spoiler]~~[code]#include <spi.h>#include <ethernet.h>#include <pubsubclient.h>#include <eeprom.h>#include <avr wdt.h="">#define PWR_CTRL A2 //Контроль напряжения
#define LED 9 //Светодиод
#define CHK_ADR 100
#define CNT_ADR 10
#define PWR_ADR 20
#define POLL_ADR 30
#define RATIO_ADR 40
! const char* topic_err = "myhome/elcounter/error";
const char* topic_cnt = "myhome/elcounter/count";
const char* topic_pwr = "myhome/elcounter/power";
const char* topic_amp = "myhome/elcounter/amp";
const char* topic_save = "myhome/elcounter/save";
const char* topic_correction = "myhome/elcounter/correction";
const char* topic_connection = "myhome/elcounter/connection";
const char* topic_ip = "myhome/elcounter/config/ip";
const char* topic_polling = "myhome/elcounter/config/polling";
const char* topic_bounce = "myhome/elcounter/config/bounce";
const char* topic_num = "myhome/elcounter/config/num";
const char* topic_reset = "myhome/elcounter/config/reset";
const char* topic_raw = "myhome/elcounter/RAW";
const char* subscr = "myhome/elcounter/#";
! byte mac[6] = {0xC4, 0xE7, 0xC4, 0x9E, 0x83, 0x12};
byte ip[4] = {192, 168, 1, 52};
byte server[4] = {192, 168, 1, 190};
! unsigned long cnt = 0;
unsigned long prev_cnt = 2;
unsigned long pwr = 0;
unsigned long prev_pwr = 2;
int amp = 0;
int prev_amp = 2;
int num = 0;
int prev_num;
int bounce = 10;
int prev_bounce;
int chk = 0;
int chk_S = 0;
unsigned long prevMillis = 0;
unsigned long prevMillis_cnt = 0;
int poll = 5000;
bool error = 0;
String cmd = "";
bool strComplete = false;
char buf [50];
char buffer[100];
char s[16];
! ////////////////////////////////////////////////////////////////////////////
void callback(char* topic, byte* payload, unsigned int length) {
payload[length] = '\0';
String strTopic = String(topic);
String strPayload = String((char*)payload);
callback_iobroker(strTopic, strPayload);
}
! EthernetClient ethClient;
PubSubClient client(ethClient);
! void setup() {
MCUSR = 0;
wdt_disable();
cmd.reserve(100);
delay(10000);
Serial.begin(115200);if (EEPROM.read(1) != 99) { //Если первый запуск
EEPROM.write(1, 99);
for (int i = 0 ; i < 4; i++) {
EEPROM.write(110 + i, ip[i]);
}
for (int i = 0 ; i < 4; i++) {
EEPROM.write(120 + i, server[i]);
}
} else {
chk = EEPROMReadInt(CHK_ADR);
cnt = EEPROMReadLong(CNT_ADR);
poll = EEPROMReadInt(POLL_ADR);
chk_S = poll - 500;
if (chk != chk_S) {
error = 2;
}
for (int i = 0; i < 4; i++) {
ip[i] = EEPROM.read(110 + i);
}
for (int i = 0; i < 4; i++) {
server[i] = EEPROM.read(120 + i);
}
}! pinMode(LED, OUTPUT);
client.setServer(server, 1883);
client.setCallback(callback);
Ethernet.begin(mac, ip);
delay(200);
wdt_enable(WDTO_8S);
if (client.connect("elcounter")) {
digitalWrite(LED, LOW);
Public();
}
}! void serialEvent() {
while (Serial.available() > 0) {
char inChar = (char)Serial.read();
cmd += inChar;
if (inChar == '\n') {
strComplete = true;
}
}
}
! void callback_iobroker(String strTopic, String strPayload) {
if (strTopic == topic_correction) {
cnt = atol((strPayload).c_str());
Serial.print("SC");
Serial.println(cnt);
client.publish(topic_correction, "0");
}
else if (strTopic == topic_save) {
if (strPayload == "true") {
Serial.println("SS");
save();
client.publish(topic_save, "false");
}
}
else if (strTopic == topic_polling) {
poll = strPayload.toInt();
if (poll < 1000) {
poll = 1000;
} else if (poll > 32767) {
poll = 32767;
}
EEPROMWriteInt(POLL_ADR, poll); //Интервал публикации
client.publish(topic_polling, IntToChar(poll));
}
else if (strTopic == topic_reset) {
if (strPayload == "true") {
client.publish(topic_reset, "false");
reboot();
}
}
else if (strTopic == topic_bounce) {
bounce = strPayload.toInt();
if (bounce < 0) {
bounce = 0;
} else if (bounce > 10000) {
bounce = 10000;
}
Serial.print("SB");
Serial.println(bounce);
client.publish(topic_bounce, IntToChar(bounce));
}
else if (strTopic == topic_num) {
num = strPayload.toInt();
if (num < 0) {
num = 0;
} else if (num > 32767) {
num = 32767;
}
Serial.print("SN");
Serial.println(num);
client.publish(topic_num, IntToChar(num));
}
}
! void save() {
chk = poll - 500;
EEPROMWriteLong(CNT_ADR, cnt); //Пишем показания счетчика в eeprom из переменной
EEPROMWriteInt(POLL_ADR, poll); //Интервал публикации
EEPROMWriteInt(CHK_ADR, chk); //чек
}
! void reboot() {
save();
delay(500);
wdt_enable(WDTO_1S);
for (;;) {}
}
! char* StrToChar (String str) {
int length = str.length();
str.toCharArray(buf, length + 1);
return buf;
}
! void EEPROMWriteLong(int p_address, unsigned long p_value) {
byte four = (p_value & 0xFF);
byte three = ((p_value >> & 0xFF);
byte two = ((p_value >> 16) & 0xFF);
byte one = ((p_value >> 24) & 0xFF);
EEPROM.write(p_address, four);
EEPROM.write(p_address + 1, three);
EEPROM.write(p_address + 2, two);
EEPROM.write(p_address + 3, one);
}
! unsigned long EEPROMReadLong(int p_address) {
long four = EEPROM.read(p_address);
long three = EEPROM.read(p_address + 1);
long two = EEPROM.read(p_address + 2);
long one = EEPROM.read(p_address + 3);
return ((four << 0) & 0xFF) + ((three << & 0xFFFF) + ((two << 16) & 0xFFFFFF) + ((one << 24) & 0xFFFFFFFF);
}
! void EEPROMWriteInt(int p_address, int p_value) {
byte lowByte = ((p_value >> 0) & 0xFF);
byte highByte = ((p_value >> & 0xFF);
EEPROM.write(p_address, lowByte);
EEPROM.write(p_address + 1, highByte);
}
unsigned int EEPROMReadInt(int p_address) {
byte lowByte = EEPROM.read(p_address);
byte highByte = EEPROM.read(p_address + 1);
return ((lowByte << 0) & 0xFF) + ((highByte << & 0xFF00);
}
! char* IntToChar (unsigned long a) {
sprintf(buf, "%lu", a);
return buf;
}
! void Public(){
sprintf(s, "%d.%d.%d.%d", ip[0], ip[1], ip[2], ip[3]);
client.publish(topic_err, " ");
client.publish(topic_cnt, IntToChar(cnt));
client.publish(topic_pwr, IntToChar(pwr));
client.publish(topic_amp, IntToChar(amp));
client.publish(topic_save, "false");
client.publish(topic_correction, "0");
client.publish(topic_connection, "true");
client.publish(topic_ip, s);
client.publish(topic_polling, IntToChar(poll));
client.publish(topic_bounce, IntToChar(bounce));
client.publish(topic_num, IntToChar(num));
client.publish(topic_reset, "false");
client.subscribe(subscr);
}
void reconnect() {
int a = 0;
while (!client.connected()) {
a++;
digitalWrite(LED, !digitalRead(LED));
wdt_reset();
if (client.connect("elcounter")) {
digitalWrite(LED, LOW);
Public();
} else {
delay(10000);
}
if (a >= 10) {
wdt_enable(WDTO_1S);
}
}
}
! void loop() {
wdt_reset();
client.loop();
if (!client.connected()) {
reconnect();
}
! if (analogRead(PWR_CTRL) < 1000) {
digitalWrite(LED, LOW);
save();
delay(10000);
}
! if (strComplete) {
digitalWrite(LED, !digitalRead(LED));
cmd.toCharArray(buffer, 100);
cnt = atoi(strtok(buffer, ";"));
pwr = atoi(strtok(NULL, ";"));
amp = atoi(strtok(NULL, ";"));
bounce = atoi(strtok(NULL, ";"));
num = atoi(strtok(NULL, ";"));
error = atoi(strtok(NULL, ";"));
client.publish(topic_raw, StrToChar(cmd));
cmd = "";
strComplete = false;
}
! if (millis() - prevMillis >= poll) {
wdt_reset();
prevMillis = millis();
if (cnt != prev_cnt || pwr != prev_pwr || amp != prev_amp) {
prev_cnt = cnt;
prev_pwr = pwr;
prev_amp = amp;
client.publish(topic_cnt, IntToChar(cnt));
client.publish(topic_pwr, IntToChar(pwr));
client.publish(topic_amp, IntToChar(amp));
}
if (num != prev_num || bounce != prev_bounce) {
prev_num = num;
prev_bounce = bounce;
client.publish(topic_num, IntToChar(num));
client.publish(topic_bounce, IntToChar(bounce));
}
if (error > 0) {
client.publish(topic_err, "err");
} else {
client.publish(topic_err, " ");
}
}</avr></eeprom.h></pubsubclient.h></ethernet.h></spi.h>`
причина проста, есть две 2560 одна считает энергию и отдает другой 2560 которая, отвечает за температуру и все это публикует. И как правильно настроить UART между двумя 2560[/i][/i][/i][/i][/code][/spoiler][/i][/i] -
как? `
! ````
if (cmd.substring(0, 1) == "S") {
if (cmd.substring(1, 2) == "N") {
num = cmd.substring(cmd.lastIndexOf('N') + 1).toInt();
}
else if (cmd.substring(1, 2) == "S") {
save();
}
else if (cmd.substring(1, 2) == "C") {
cnt = atol(cmd.substring(cmd.lastIndexOf('C') + 1).c_str());
}
else if (cmd.substring(1, 2) == "B") {
bounce = cmd.substring(cmd.lastIndexOf('B') + 1).toInt();
}
save();
}
cmd = "";
strComplete = false;
}т.о. чтобы задать bounce надо в уарт послать B1000 например. или чтобы задать данные счетчика то - C51423 Как объединить этот код …......... и код вот этот... >! ```` >! void serialEvent() { while (Serial.available() > 0) { char inChar = (char)Serial.read(); cmd += inChar; if (inChar == '\n') { strComplete = true; } } } if (strComplete) { digitalWrite(LED, !digitalRead(LED)); cmd.toCharArray(buffer, 100); cnt = atoi(strtok(buffer, ";")); pwr = atoi(strtok(NULL, ";")); amp = atoi(strtok(NULL, ";")); bounce = atoi(strtok(NULL, ";")); num = atoi(strtok(NULL, ";")); error = atoi(strtok(NULL, ";")); client.publish(topic_raw, StrToChar(cmd)); cmd = ""; strComplete = false; } >! ```` Тут мы как раз получаем данные из уарт и парсим их, а дальше делай что хочешь -
ой мамочки…. У меня есть немного вопросов касаемо счетчика:
1. тип оборудования Arduino Uno + Mega 2560
2. Скетч Count - на УНО завелся без проблем, показания получаю.
3. Как правильно состыковать УНО и МЕГА, сделано так TX & RX Uno соединены с RX(0) & TX(1) Mega, ни чего нет на Меге.
4. Самое противное, при заливке скетча MQTT на 2560 получаю странную картину - постоянно мигает светодиод L и Мега ни как не реагирует на поступающие данные, и не пингуется по своему адресу. в кодах ни чего не менял кроме ip адресов
Куда рыть далее???
-
по умолчанию считаю что в обоих скетчах - UART уже прописан. или я не прав?
-
Пардон, не UNO а NANO
-
и еще в Count и MQTT есть такие строки
Count
#define PWR_CTRL A0
MQTT
#define PWR_CTRL A2 //Контроль напряжения
прошу пояснить их назначение и схемку подключения
-
ой мамочки…. У меня есть немного вопросов касаемо счетчика:
1. тип оборудования Arduino Uno + Mega 2560
2. Скетч Count - на УНО завелся без проблем, показания получаю.
3. Как правильно состыковать УНО и МЕГА, сделано так TX & RX Uno соединены с RX(0) & TX(1) Mega, ни чего нет на Меге.
4. Самое противное, при заливке скетча MQTT на 2560 получаю странную картину - постоянно мигает светодиод L и Мега ни как не реагирует на поступающие данные, и не пингуется по своему адресу. в кодах ни чего не менял кроме ip адресов
Куда рыть далее??? ` убери из кода ватчдог либо залей оптибут в мегу.
-
и еще в Count и MQTT есть такие строки
Count
#define PWR_CTRL A0
MQTT
#define PWR_CTRL A2 //Контроль напряжения
прошу пояснить их назначение и схемку подключения ` контроль питания на порту. При пропадании питания сохраняются данные в епром
-
Вачдог…
Это
void reboot() {
save();
delay(500);
wdt_enable(WDTO_1S);
for (;;) {}
}
-
для контроля питания, что то подавать надо, или это аппаратно решено??
-
Сразу скажу, не селен я в программировании, все что делаю сам для ардуины - это просто результат ДООЛГОГО разбирательства чужих кодов, делаю на уровне подсознания…..
-
Вачдог…
Это
void reboot() { save(); delay(500); wdt_enable(WDTO_1S); for (;;) {} } ```` `Тут тоже. В начале кода еще ищи команду wdt_enable.
Либо прошей загрузчик https://github.com/instalator/optiboot, в котором исправлен баг с ватчдогом.
-
А вот тут и возникла проблема… Не заливаются скетчи.... любая попытка заканчивается ошибкой закачки скетча.... И бешеный светодиод......

{kind=link}