

Скрипт для счётчика
-
И еще, хотелось бы схемку, подключения счетчика…..
Да, по отдельности оба скетча скомпилились без проблем...
-
Обновил информацию по статье на твоем Блоге, но не дружу с UART, как это выглядит для домохозяек….
-
Таааак…. А вот с этого места поподробнее... Если я правильно понимаю, одна сборка снимает показания и передает их другой сборке, которая по MQTT их публикует.... Эт получается надо пару ардуин вешать?? А как обмен между ними организован??
Сечас я использую одну 2560 для обработки температуры, датчиков освещения и контроля за насосом и промсетью, а на второй 2560 пытаюсь сделать счетчик КВт.....
и возможно на нее же посажу управление вентиляцией и освещением... `
Импульсы считает отдельный МК, сделано для того чтобы не пропускались импульсы и ни на что другое не влияло. Выдает данные на уарт, второй МК принимает эти данные и шлёт уже по mqtt.Возьми для счётчика например ардуиной про мини и ей считай только импульсы. А вся остальная логика - mqtt, датчики и ТД и тп
-
Попробовал залить скетч Count в 2560…. Результат отрицательный, в сериал ни чего не летит.... ПРверял Монитором порта от IDE Arduino 1.6.13.
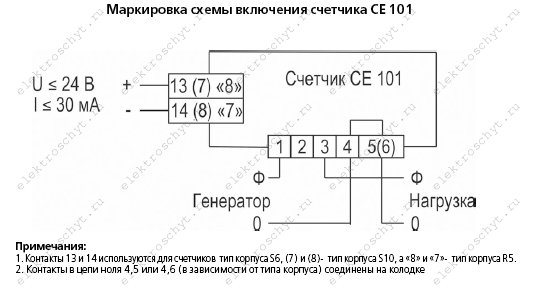
Я правильно понимаю что один выход счетчика подключаем к А0, второй к GND или я не прав.
Вот типовая схема счетчика
1308_watermarked-shema-se101.png.jpg -
Попробовал залить скетч Count в 2560…. Результат отрицательный, в сериал ни чего не летит.... ПРверял Монитором порта от IDE Arduino 1.6.13.
Я правильно понимаю что один выход счетчика подключаем к А0, второй к GND или я не прав.
Вот типовая схема счетчика `
Нет, вход идет на вход прерывания INT0. -
Все, сдаюсь. Ткните носом - куда подключать выводы от счетчика…. INT0- это какая нога(pin) на 2560, 21? или я уже ни чего не понимаю
И где в скетче это прописано....
Считывание идет, как я вижу со 2 pin.....
! ````
#include <eeprom.h>
#include <avr wdt.h="">
#include <avr io.h="">
#include <avr interrupt.h="">
! #define PWR_CTRL A0
#define CNT_ADR 10
#define PWR_ADR 20
#define IMP_ADR 30
#define BNC_ADR 40
#define NUM_ADR 50
#define CHK_ADR 100
! volatile unsigned long cnt = 1 ;
volatile unsigned long prev_cnt = 0;
volatile unsigned long pwr = 0;
volatile unsigned long prev_pwr = 1;
unsigned long chk = 0;
int num = 3200;
int imp = 0;
int amp = 0;
int prev_amp = 0;
int bounce = 1;
unsigned long prev;
volatile unsigned long prev_millis;
volatile unsigned long cur_tmS = millis();
volatile unsigned long pre_tmS = cur_tmS;
volatile float diffS = 0;
volatile unsigned long tm_diffS = 0;
bool err = false;
String cmd = "";
bool strComplete = false;
! //////////////////////////////////////////////////////////////////////////////////////////////////////////////
void setup() {
MCUSR = 0;
wdt_disable();
Serial.begin(115200);
cmd.reserve(200);
Serial.print("Start");
pinMode(2, INPUT);
digitalWrite(2, HIGH);
delay(200);
if (EEPROM.read(1) != 88) { //Если первый запуск
EEPROM.write(1, 88);
} else {
chk = EEPROMReadLong(CHK_ADR);
cnt = EEPROMReadLong(CNT_ADR);
pwr = EEPROMReadLong(PWR_ADR);
imp = EEPROMReadInt(IMP_ADR);
num = EEPROMReadInt(NUM_ADR);
bounce = EEPROMReadInt(BNC_ADR);
if (chk != cnt + imp + bounce) {
err = true;
}
}
wdt_enable(WDTO_8S);
attachInterrupt(0, count, FALLING);
}
! void loop() {
wdt_reset();
if (analogRead(PWR_CTRL) < 1000) {
save();
}
! if (strComplete) {
// Serial.println(inputString);
if (cmd.substring(0, 1) == "S") {
if (cmd.substring(1, 2) == "N") {
num = cmd.substring(cmd.lastIndexOf('N') + 1).toInt();
}
else if (cmd.substring(1, 2) == "S") {
save();
}
else if (cmd.substring(1, 2) == "C") {
cnt = atol(cmd.substring(cmd.lastIndexOf('C') + 1).c_str());
}
else if (cmd.substring(1, 2) == "B") {
bounce = cmd.substring(cmd.lastIndexOf('B') + 1).toInt();
}
save();
}
cmd = "";
strComplete = false;
}
! tm_diffS = cur_tmS - pre_tmS;
diffS = (float(tm_diffS) / 1000);
pwr = 3600000 / (num * diffS);
if ((cnt != prev_cnt || amp != prev_amp || pwr >= (prev_pwr + 10) || pwr <= (prev_pwr - 10)) && pwr > 0 && millis() - 2000 > prev) {
prev = millis();
Serial.print(cnt);
Serial.print(";");
if (pwr > (prev_pwr + 4000)) {
Serial.print(prev_pwr);
} else {
Serial.print(pwr);
}
Serial.print(";");
Serial.print(amp);
Serial.print(";");
Serial.print(bounce);
Serial.print(";");
Serial.print(num);
Serial.print(";");
Serial.print(err);
Serial.print('\n');
}
prev_cnt = cnt;
prev_amp = amp;
prev_pwr = pwr;
}
! void count() {
detachInterrupt(0);
if (millis() - bounce > prev_millis) {
prev_millis = millis();
pre_tmS = cur_tmS;
cur_tmS = millis();
imp++;
if (imp >= num) {
imp = 0;
cnt++;
}
}
attachInterrupt(0, count, FALLING);
}
! void serialEvent() {
while (Serial.available() > 0) {
char inChar = (char)Serial.read();
cmd += inChar;
if (inChar == '\n') {
strComplete = true;
}
}
}
! void save() {
chk = cnt + imp + bounce;
EEPROMWriteLong(CNT_ADR, cnt);
EEPROMWriteLong(PWR_ADR, pwr);
EEPROMWriteInt(IMP_ADR, imp);
EEPROMWriteInt(NUM_ADR, num);
EEPROMWriteInt(BNC_ADR, bounce);
EEPROMWriteLong(CHK_ADR, chk);
}
! void EEPROMWriteLong(int p_address, unsigned long p_value) {
byte four = (p_value & 0xFF);
byte three = ((p_value >> 8) & 0xFF);
byte two = ((p_value >> 16) & 0xFF);
byte one = ((p_value >> 24) & 0xFF);
EEPROM.write(p_address, four);
EEPROM.write(p_address + 1, three);
EEPROM.write(p_address + 2, two);
EEPROM.write(p_address + 3, one);
}
! unsigned long EEPROMReadLong(int p_address) {
long four = EEPROM.read(p_address);
long three = EEPROM.read(p_address + 1);
long two = EEPROM.read(p_address + 2);
long one = EEPROM.read(p_address + 3);
return ((four << 0) & 0xFF) + ((three << 8) & 0xFFFF) + ((two << 16) & 0xFFFFFF) + ((one << 24) & 0xFFFFFFFF);
}
! void EEPROMWriteInt(int p_address, int p_value) {
byte lowByte = ((p_value >> 0) & 0xFF);
byte highByte = ((p_value >> 8) & 0xFF);
EEPROM.write(p_address, lowByte);
EEPROM.write(p_address + 1, highByte);
}
unsigned int EEPROMReadInt(int p_address) {
byte lowByte = EEPROM.read(p_address);
byte highByte = EEPROM.read(p_address + 1);
return ((lowByte << 0) & 0xFF) + ((highByte << 8) & 0xFF00);
}</avr></avr></avr></eeprom.h> -
Хотя…. отключив логику и перелистав ДатаШИТ на 2560, понимаю что INT0 - это pin2 (RX0)
и тогда, о чудо.... я увидел вот это....
! ````
4278188031;4294427971;0;-5;-5;1
4278188031;4294427161;0;-5;-5;1
4278188031;4294414725;0;-5;-5;1
4278188031;4294429983;0;-5;-5;1
4278188031;4294433568;0;-5;-5;1
4278188031;4294428374;0;-5;-5;1
4278188031;4294415995;0;-5;-5;1
4278188031;4294427971;0;-5;-5;1
4278188031;4294428777;0;-5;-5;1
4278188031;4294427161;0;-5;-5;1
4278188031;4294413876;0;-5;-5;1
4278188031;4294422667;0;-5;-5;1
4278188031;4294426350;0;-5;-5;1
4278188031;4294425128;0;-5;-5;1
4278188031;4294426350;0;-5;-5;1Это то что я ищу??? -
Хотя…. отключив логику и перелистав ДатаШИТ на 2560, понимаю что INT0 - это pin2 (RX0)
и тогда, о чудо.... я увидел вот это....
! ````
4278188031;4294427971;0;-5;-5;1
4278188031;4294427161;0;-5;-5;1
4278188031;4294414725;0;-5;-5;1
4278188031;4294429983;0;-5;-5;1
4278188031;4294433568;0;-5;-5;1
4278188031;4294428374;0;-5;-5;1
4278188031;4294415995;0;-5;-5;1
4278188031;4294427971;0;-5;-5;1
4278188031;4294428777;0;-5;-5;1
4278188031;4294427161;0;-5;-5;1
4278188031;4294413876;0;-5;-5;1
4278188031;4294422667;0;-5;-5;1
4278188031;4294426350;0;-5;-5;1
4278188031;4294425128;0;-5;-5;1
4278188031;4294426350;0;-5;-5;1Это то что я ищу??? ` да, только надо конфиг задать через уарт -
как? И еще вопрос, просто хочется оперативно посмотреть результаты….
Как объединить этот код
! ```
`#include <spi.h> // Ethernet shield
#include <ethernet.h> // Ethernet shield
#include <pubsubclient.h> // MQTT
#include <servo.h>
#include <dht.h>
#include <onewire.h>
#include <dallastemperature.h>
Servo servo;
! byte mac[] = { 0xC1, 0x7C, 0x38, 0x41, 0x89, 0x15 };
byte server[] = { 192, 168, 10, 15 }; //IP Брокера
byte ip[] = { 192, 168, 10, 88 }; //IP Клиента (Arduino)
! ////////////////////////////////////////////////////////////////////////////
void callback(char* topic, byte* payload, unsigned int length) {
payload[length] = '\0';
// Serial.print(topic);
// Serial.print("=");
String strTopic = String(topic);
String strPayload = String((char*)payload);
// Serial.println(strPayload);
callback_iobroker(strTopic, strPayload);
}
! EthernetClient ethClient;
PubSubClient client(server, 1883, callback, ethClient);
#define id_connect "myhome-temp"
#define id_connect "myhome-status"
#define Prefix_subscribe "myhome/Temp/"
#define Prefix_subscribe "myhome/Status/"
! ///////////////Объявляем порты ввода-вывода
#define ServoPin 3 //Порт к которому подключен сервопривод
! const int start_DI_pin []= {2, 4, 5}; // Порты Ввода
int n_DI_pin = sizeof(start_DI_pin) / sizeof(start_DI_pin[0])-1; //Вычисляем длинну массива
! const int start_DO_pin []= {6, 7}; //Порты Вывода
int n_DO_pin = sizeof(start_DO_pin) / sizeof(start_DO_pin[0])-1; //Вычисляем длинну массива
! int DI[] = {0, 0, 0};
int old_DI[] = {0, 0, 0};
! ///////////////////////////Переменные для работы с освещением//////////////////////////////////////
int ServoAngle = 100; //Угол сервопривода при включении
int flag = 0;
int flag2 = 0;
int pause = 0;
! //------------------------------------------- Sensors -------------------------------------------//
const int MQ7_Pin = A0; // Куда подключили MQ7
//int MQ7Value = 0;
int MQ7Value = analogRead(MQ7_Pin);const int foto_Pin = A1; // устанавливаем входную ногу для Фоторезистора
//unsigned int fotoValue = 0; // цифровое значение фоторезистора
unsigned int fotoValue = analogRead(foto_Pin);! #define ONE_WIRE_BUS 8
//#define TEMPERATURE_PRECISION 9
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature DS_sensors(&oneWire);
// 28 80 E9 3A 04 00 00 10
//T0:28 88 AD D7 02 00 00 42
//T1:28 14 A5 D7 02 00 00 B0
//T2:28 72 26 7B 04 00 00 2E
//T3:28 CA 1A 3B 04 00 00 CD
//T4:28 E6 D5 D7 02 00 00 C1
//T5:28 16 B4 7A 04 00 00 8A
//T6:28 2B 86 D7 02 00 00 CF
//T7:28 AB 9D D7 02 00 00 29
DeviceAddress addr_T1 = { 0x28, 0x80, 0xE9, 0x3A, 0x4, 0x0, 0x0, 0x10 };//кладовка
DeviceAddress addr_T2 = { 0x28, 0x88, 0xAD, 0xD7, 0x2, 0x0, 0x0, 0x42 };//кухня
DeviceAddress addr_T3 = { 0x28, 0x14, 0xA5, 0xD7, 0x2, 0x0, 0x0, 0xB0 };//детская
DeviceAddress addr_T4 = { 0x28, 0x72, 0x26, 0x7B, 0x4, 0x0, 0x0, 0x2E };//гараж
DeviceAddress addr_T5 = { 0x28, 0xCA, 0x1A, 0x3B, 0x4, 0x0, 0x0, 0xCD };//ванная
DeviceAddress addr_T6 = { 0x28, 0xE6, 0xD5, 0xD7, 0x2, 0x0, 0x0, 0xC1 };//улица
DeviceAddress addr_T7 = { 0x28, 0x16, 0xB4, 0x7A, 0x4, 0x0, 0x0, 0x8A };//спальня2
DeviceAddress addr_T8 = { 0x28, 0x2B, 0x86, 0xD7, 0x2, 0x0, 0x0, 0xCF };//зал
DeviceAddress addr_T9 = { 0x28, 0xAB, 0x9D, 0xD7, 0x2, 0x0, 0x0, 0x29 };//мансарда
! float T1=0;
float T2=0;
float T3=0;
float T4=0;
float T5=0;
float T6=0;
float T7=0;
float T8=0;
float T9=0;
! //dht DHT;
//#define DHT22_PIN 9
//float Hout = 0;
//float Tout = 0;
! ////////////////////////////////////////////////////////////////////////////
//void callback(char* topic, byte* payload, unsigned int length) {
// payload[length] = '\0';
// Serial.print(topic);
// Serial.print("=");
// String strTopic = String(topic);
// String strPayload = String((char*)payload);
// Serial.println(strPayload);
// callback_iobroker(strTopic, strPayload);
//}
////////////////////////////////////////////////////////////////////////////
void setup() {
Serial.begin(57600);
Serial.println("start");Serial.print("Locating devices...");
DS_sensors.begin();
Serial.print("Found ");
Serial.print(DS_sensors.getDeviceCount(), DEC);
Serial.println(" devices.");! // report parasite power requirements
Serial.print("Parasite power is: ");
if (DS_sensors.isParasitePowerMode()) Serial.println("ON");
else Serial.println("OFF");//Объявляем порты Digital inputs/outputsfor(int i=0 ;i<=n_DI_pin; i++) { pinMode (start_DI_pin [i], INPUT); }
digitalWrite(5, HIGH); //Насос скважины
digitalWrite(4, HIGH); //Электрика
for(int i=0 ;i<=n_DO_pin; i++) { pinMode (start_DO_pin [i], OUTPUT); }! Ethernet.begin(mac, ip);
if (client.connect(id_connect)) {
getSensors();
control();
//client.publish("myhome/Kitchen/Change_Counter", "0");
//client.publish("myhome/Kitchen/Temp_room", "0");
//client.publish("myhome/Kitchen/Humidity_room", "0");
client.publish("myhome/Temp/Kladovka", "0");
client.publish("myhome/Temp/Kitchen", "0");
client.publish("myhome/Temp/Detskaya", "0");
client.publish("myhome/Temp/Garage", "0");
client.publish("myhome/Temp/Street", "0");
client.publish("myhome/Temp/Spalnya2", "0");
client.publish("myhome/Temp/Zal", "0");
client.publish("myhome/Temp/Mansarda", "0");
client.publish("myhome/Temp/Vannaya", "0");//client.publish("myhome/Kitchen/Lux", "0"); //client.publish("myhome/Kitchen/Servo", "0"); client.publish("myhome/Temp/MQ7", "0"); client.publish("myhome/Status/Power", "0"); client.publish("myhome/Status/Pompe", "0"); client.subscribe("myhome/Temp/#"); client.subscribe("myhome/Status/#");}
}
/////////////////////////////////////////////////////////////////////////
void loop() {
client.loop();
control();
getSensors();
if (!client.connected()) {
if (client.connect(id_connect)) {
control();
getSensors();
client.subscribe("myhome/Temp/#");
}
}
}</dallastemperature.h></onewire.h></dht.h></servo.h></pubsubclient.h></ethernet.h></spi.h>`! function.ino
`[code]//--------------------------------- Functions ---------------------------------//
/////////////////////////////////От Брокера//////////////////////////////////////////////
void callback_iobroker(String strTopic, String strPayload){
if (strTopic == "myhome/Kitchen/Servo"){
ServoAngle=strPayload.toInt();
if (ServoAngle >= 0 && ServoAngle <= 255){
servo.attach(ServoPin);
//delay(200); //ждем 2 секунды
servo.write(ServoAngle); //ставим вал под 0
delay(1000); //ждем 2 секунды
//client.publish("myhome/Kitchen/Servo", b);
servo.detach();
}
}
}
! ////////////////////////////////////Брокеру/////////////////////////////////////
void control(){if(digitalRead(5)==HIGH && flag==0) { //если насос включен client.publish("myhome/Status/Pompe", "1"); flag=1; } if(digitalRead(5)==LOW && flag==1){//если насос выключен client.publish("myhome/Status/Pompe", "0"); flag=0;//обнуляем переменную flag } if(digitalRead(4)==HIGH && flag2==0) { // Если электрика есть client.publish("myhome/Status/Power", "1"); flag2=1; } if(digitalRead(4)==LOW && flag2==1){// Если эректрики нет client.publish("myhome/Status/Power", "0"); flag2=0;//обнуляем переменную flag }}
///////////////////////////////Данные сенсоров////////////////////////////////////! void getSensors () {
! MQ7Value = analogRead(MQ7_Pin);
fotoValue = analogRead(foto_Pin); // считываем значение с фоторезистора
// ServoAngle = analogRead(2);
! //Обработка данных датчика DHT22. Подключение к порту цифровому P9 Arduino
//Глобальные переменные Hout и Tout типа флоат - влажность (%) и температура (град. С)
// if (DHT.read22(DHT22_PIN)== DHTLIB_OK) {
// Hout = DHT.humidity;
// Tout = DHT.temperature;
// }
// if (Hout == 0 || Tout == 0){
// delay (1000);
// if (DHT.read22(DHT22_PIN)== DHTLIB_OK) {
// Hout = DHT.humidity;
// Tout = DHT.temperature;
// }
// }
//Обработка данных цифровых датчиков температуры типа DS18B20.
//Шина 1-Wire на цифровой пин P8 Arduino.
//Подключено 2 датчика температуры, адреса задаются в секции глобальных констант "Sensors"
//Три значение температуры T1, T2, типа float (град. С).
DS_sensors.setResolution(addr_T1, 9);
DS_sensors.setResolution(addr_T2, 9);
DS_sensors.setResolution(addr_T3, 9);
DS_sensors.setResolution(addr_T4, 9);
DS_sensors.setResolution(addr_T5, 9);
DS_sensors.setResolution(addr_T6, 9);
DS_sensors.setResolution(addr_T7, 9);
DS_sensors.setResolution(addr_T8, 9);
DS_sensors.setResolution(addr_T9, 9);float T1 = DS_sensors.getTempC(addr_T1);
float T2 = DS_sensors.getTempC(addr_T2);
float T3 = DS_sensors.getTempC(addr_T3);
float T4 = DS_sensors.getTempC(addr_T4);
float T5 = DS_sensors.getTempC(addr_T5);
float T6 = DS_sensors.getTempC(addr_T6);
float T7 = DS_sensors.getTempC(addr_T7);
float T8 = DS_sensors.getTempC(addr_T8);
float T9 = DS_sensors.getTempC(addr_T9);DS_sensors.requestTemperatures();
//Serial.print(DS_sensors.getResolution(addr_T1), DEC);
Serial.println();
Serial.print("Temp T1 C: ");
Serial.print(T1);
Serial.println();! Serial.println();
Serial.print("Temp T2 C: ");
Serial.print(T2);
Serial.println();
//
Serial.println();
Serial.print("Temp T3 C: ");
Serial.print(T3);
Serial.println();
//
Serial.println();
Serial.print("Temp T4 C: ");
Serial.print(T4);
Serial.println();
//
Serial.println();
Serial.print("Temp T5 C: ");
Serial.print(T5);
Serial.println();
//
Serial.println();
Serial.print("Temp T6 C: ");
Serial.print(T6);
Serial.println();
//
Serial.println();
Serial.print("Temp T7 C: ");
Serial.print(T7);
Serial.println();
//
Serial.println();
Serial.print("Temp T8 C: ");
Serial.print(T8);
Serial.println();
//
Serial.println();
Serial.print("Temp T9 C: ");
Serial.print(T9);
Serial.println();
//
///////////////////////Паблик данных сенсоров////////////////////////
if (pause == 50 || pause == 0){char b[5];
// String char_Hout = String(Hout);
// char_Hout.toCharArray(b,5);
// client.publish("myhome/Kitchen/Humidity_room", b);// String char_Tout = String(Tout);
// char_Tout.toCharArray(b,5);
// client.publish("myhome/Kitchen/Temp_room", b);String char_T1 = String(T1); char_T1.toCharArray(b,5); client.publish("myhome/Temp/Kladovka", b); String char_T2 = String(T2); char_T2.toCharArray(b,5); client.publish("myhome/Temp/Kitchen", b); String char_T3 = String(T3); char_T3.toCharArray(b,5); client.publish("myhome/Temp/Detskaya", b); String char_T4 = String(T4); char_T4.toCharArray(b,5); client.publish("myhome/Temp/Garage", b); String char_T5 = String(T5); char_T5.toCharArray(b,5); client.publish("myhome/Temp/Vannaya", b); String char_T6 = String(T6); char_T6.toCharArray(b,5); client.publish("myhome/Temp/Street", b); String char_T7 = String(T7); char_T7.toCharArray(b,5); client.publish("myhome/Temp/Spalnya2", b); String char_T8 = String(T8); char_T8.toCharArray(b,5); client.publish("myhome/Temp/Zal", b); String char_T9 = String(T9); char_T9.toCharArray(b,5); client.publish("myhome/Temp/Mansarda", b); //Serial.println(T1); String char_fotoValue = String(fotoValue); char_fotoValue.toCharArray(b,4); client.publish("myhome/Kitchen/Lux", b);String char_ServoAngle = String(ServoAngle);
char_ServoAngle.toCharArray(b,4);
client.publish("myhome/Kitchen/Servo", b);String char_MQ7Value = String(MQ7Value); char_MQ7Value.toCharArray(b,4); client.publish("myhome/Temp/MQ7", b); pause = 1;}
else pause++;
}! [/code]
и код вот этот... ! >! ~~[spoiler]~~[code]#include <spi.h>#include <ethernet.h>#include <pubsubclient.h>#include <eeprom.h>#include <avr wdt.h="">#define PWR_CTRL A2 //Контроль напряжения
#define LED 9 //Светодиод
#define CHK_ADR 100
#define CNT_ADR 10
#define PWR_ADR 20
#define POLL_ADR 30
#define RATIO_ADR 40
! const char* topic_err = "myhome/elcounter/error";
const char* topic_cnt = "myhome/elcounter/count";
const char* topic_pwr = "myhome/elcounter/power";
const char* topic_amp = "myhome/elcounter/amp";
const char* topic_save = "myhome/elcounter/save";
const char* topic_correction = "myhome/elcounter/correction";
const char* topic_connection = "myhome/elcounter/connection";
const char* topic_ip = "myhome/elcounter/config/ip";
const char* topic_polling = "myhome/elcounter/config/polling";
const char* topic_bounce = "myhome/elcounter/config/bounce";
const char* topic_num = "myhome/elcounter/config/num";
const char* topic_reset = "myhome/elcounter/config/reset";
const char* topic_raw = "myhome/elcounter/RAW";
const char* subscr = "myhome/elcounter/#";
! byte mac[6] = {0xC4, 0xE7, 0xC4, 0x9E, 0x83, 0x12};
byte ip[4] = {192, 168, 1, 52};
byte server[4] = {192, 168, 1, 190};
! unsigned long cnt = 0;
unsigned long prev_cnt = 2;
unsigned long pwr = 0;
unsigned long prev_pwr = 2;
int amp = 0;
int prev_amp = 2;
int num = 0;
int prev_num;
int bounce = 10;
int prev_bounce;
int chk = 0;
int chk_S = 0;
unsigned long prevMillis = 0;
unsigned long prevMillis_cnt = 0;
int poll = 5000;
bool error = 0;
String cmd = "";
bool strComplete = false;
char buf [50];
char buffer[100];
char s[16];
! ////////////////////////////////////////////////////////////////////////////
void callback(char* topic, byte* payload, unsigned int length) {
payload[length] = '\0';
String strTopic = String(topic);
String strPayload = String((char*)payload);
callback_iobroker(strTopic, strPayload);
}
! EthernetClient ethClient;
PubSubClient client(ethClient);
! void setup() {
MCUSR = 0;
wdt_disable();
cmd.reserve(100);
delay(10000);
Serial.begin(115200);if (EEPROM.read(1) != 99) { //Если первый запуск
EEPROM.write(1, 99);
for (int i = 0 ; i < 4; i++) {
EEPROM.write(110 + i, ip[i]);
}
for (int i = 0 ; i < 4; i++) {
EEPROM.write(120 + i, server[i]);
}
} else {
chk = EEPROMReadInt(CHK_ADR);
cnt = EEPROMReadLong(CNT_ADR);
poll = EEPROMReadInt(POLL_ADR);
chk_S = poll - 500;
if (chk != chk_S) {
error = 2;
}
for (int i = 0; i < 4; i++) {
ip[i] = EEPROM.read(110 + i);
}
for (int i = 0; i < 4; i++) {
server[i] = EEPROM.read(120 + i);
}
}! pinMode(LED, OUTPUT);
client.setServer(server, 1883);
client.setCallback(callback);
Ethernet.begin(mac, ip);
delay(200);
wdt_enable(WDTO_8S);
if (client.connect("elcounter")) {
digitalWrite(LED, LOW);
Public();
}
}! void serialEvent() {
while (Serial.available() > 0) {
char inChar = (char)Serial.read();
cmd += inChar;
if (inChar == '\n') {
strComplete = true;
}
}
}
! void callback_iobroker(String strTopic, String strPayload) {
if (strTopic == topic_correction) {
cnt = atol((strPayload).c_str());
Serial.print("SC");
Serial.println(cnt);
client.publish(topic_correction, "0");
}
else if (strTopic == topic_save) {
if (strPayload == "true") {
Serial.println("SS");
save();
client.publish(topic_save, "false");
}
}
else if (strTopic == topic_polling) {
poll = strPayload.toInt();
if (poll < 1000) {
poll = 1000;
} else if (poll > 32767) {
poll = 32767;
}
EEPROMWriteInt(POLL_ADR, poll); //Интервал публикации
client.publish(topic_polling, IntToChar(poll));
}
else if (strTopic == topic_reset) {
if (strPayload == "true") {
client.publish(topic_reset, "false");
reboot();
}
}
else if (strTopic == topic_bounce) {
bounce = strPayload.toInt();
if (bounce < 0) {
bounce = 0;
} else if (bounce > 10000) {
bounce = 10000;
}
Serial.print("SB");
Serial.println(bounce);
client.publish(topic_bounce, IntToChar(bounce));
}
else if (strTopic == topic_num) {
num = strPayload.toInt();
if (num < 0) {
num = 0;
} else if (num > 32767) {
num = 32767;
}
Serial.print("SN");
Serial.println(num);
client.publish(topic_num, IntToChar(num));
}
}
! void save() {
chk = poll - 500;
EEPROMWriteLong(CNT_ADR, cnt); //Пишем показания счетчика в eeprom из переменной
EEPROMWriteInt(POLL_ADR, poll); //Интервал публикации
EEPROMWriteInt(CHK_ADR, chk); //чек
}
! void reboot() {
save();
delay(500);
wdt_enable(WDTO_1S);
for (;;) {}
}
! char* StrToChar (String str) {
int length = str.length();
str.toCharArray(buf, length + 1);
return buf;
}
! void EEPROMWriteLong(int p_address, unsigned long p_value) {
byte four = (p_value & 0xFF);
byte three = ((p_value >> 8) & 0xFF);
byte two = ((p_value >> 16) & 0xFF);
byte one = ((p_value >> 24) & 0xFF);
EEPROM.write(p_address, four);
EEPROM.write(p_address + 1, three);
EEPROM.write(p_address + 2, two);
EEPROM.write(p_address + 3, one);
}
! unsigned long EEPROMReadLong(int p_address) {
long four = EEPROM.read(p_address);
long three = EEPROM.read(p_address + 1);
long two = EEPROM.read(p_address + 2);
long one = EEPROM.read(p_address + 3);
return ((four << 0) & 0xFF) + ((three << 8) & 0xFFFF) + ((two << 16) & 0xFFFFFF) + ((one << 24) & 0xFFFFFFFF);
}
! void EEPROMWriteInt(int p_address, int p_value) {
byte lowByte = ((p_value >> 0) & 0xFF);
byte highByte = ((p_value >> 8) & 0xFF);
EEPROM.write(p_address, lowByte);
EEPROM.write(p_address + 1, highByte);
}
unsigned int EEPROMReadInt(int p_address) {
byte lowByte = EEPROM.read(p_address);
byte highByte = EEPROM.read(p_address + 1);
return ((lowByte << 0) & 0xFF) + ((highByte << 8) & 0xFF00);
}
! char* IntToChar (unsigned long a) {
sprintf(buf, "%lu", a);
return buf;
}
! void Public(){
sprintf(s, "%d.%d.%d.%d", ip[0], ip[1], ip[2], ip[3]);
client.publish(topic_err, " ");
client.publish(topic_cnt, IntToChar(cnt));
client.publish(topic_pwr, IntToChar(pwr));
client.publish(topic_amp, IntToChar(amp));
client.publish(topic_save, "false");
client.publish(topic_correction, "0");
client.publish(topic_connection, "true");
client.publish(topic_ip, s);
client.publish(topic_polling, IntToChar(poll));
client.publish(topic_bounce, IntToChar(bounce));
client.publish(topic_num, IntToChar(num));
client.publish(topic_reset, "false");
client.subscribe(subscr);
}
void reconnect() {
int a = 0;
while (!client.connected()) {
a++;
digitalWrite(LED, !digitalRead(LED));
wdt_reset();
if (client.connect("elcounter")) {
digitalWrite(LED, LOW);
Public();
} else {
delay(10000);
}
if (a >= 10) {
wdt_enable(WDTO_1S);
}
}
}
! void loop() {
wdt_reset();
client.loop();
if (!client.connected()) {
reconnect();
}
! if (analogRead(PWR_CTRL) < 1000) {
digitalWrite(LED, LOW);
save();
delay(10000);
}
! if (strComplete) {
digitalWrite(LED, !digitalRead(LED));
cmd.toCharArray(buffer, 100);
cnt = atoi(strtok(buffer, ";"));
pwr = atoi(strtok(NULL, ";"));
amp = atoi(strtok(NULL, ";"));
bounce = atoi(strtok(NULL, ";"));
num = atoi(strtok(NULL, ";"));
error = atoi(strtok(NULL, ";"));
client.publish(topic_raw, StrToChar(cmd));
cmd = "";
strComplete = false;
}
! if (millis() - prevMillis >= poll) {
wdt_reset();
prevMillis = millis();
if (cnt != prev_cnt || pwr != prev_pwr || amp != prev_amp) {
prev_cnt = cnt;
prev_pwr = pwr;
prev_amp = amp;
client.publish(topic_cnt, IntToChar(cnt));
client.publish(topic_pwr, IntToChar(pwr));
client.publish(topic_amp, IntToChar(amp));
}
if (num != prev_num || bounce != prev_bounce) {
prev_num = num;
prev_bounce = bounce;
client.publish(topic_num, IntToChar(num));
client.publish(topic_bounce, IntToChar(bounce));
}
if (error > 0) {
client.publish(topic_err, "err");
} else {
client.publish(topic_err, " ");
}
}</avr></eeprom.h></pubsubclient.h></ethernet.h></spi.h>`
причина проста, есть две 2560 одна считает энергию и отдает другой 2560 которая, отвечает за температуру и все это публикует. И как правильно настроить UART между двумя 2560[/i][/i][/i][/i][/code][/spoiler][/i][/i] -
как? `
! ````
if (cmd.substring(0, 1) == "S") {
if (cmd.substring(1, 2) == "N") {
num = cmd.substring(cmd.lastIndexOf('N') + 1).toInt();
}
else if (cmd.substring(1, 2) == "S") {
save();
}
else if (cmd.substring(1, 2) == "C") {
cnt = atol(cmd.substring(cmd.lastIndexOf('C') + 1).c_str());
}
else if (cmd.substring(1, 2) == "B") {
bounce = cmd.substring(cmd.lastIndexOf('B') + 1).toInt();
}
save();
}
cmd = "";
strComplete = false;
}т.о. чтобы задать bounce надо в уарт послать B1000 например. или чтобы задать данные счетчика то - C51423 Как объединить этот код …......... и код вот этот... >! ```` >! void serialEvent() { while (Serial.available() > 0) { char inChar = (char)Serial.read(); cmd += inChar; if (inChar == '\n') { strComplete = true; } } } if (strComplete) { digitalWrite(LED, !digitalRead(LED)); cmd.toCharArray(buffer, 100); cnt = atoi(strtok(buffer, ";")); pwr = atoi(strtok(NULL, ";")); amp = atoi(strtok(NULL, ";")); bounce = atoi(strtok(NULL, ";")); num = atoi(strtok(NULL, ";")); error = atoi(strtok(NULL, ";")); client.publish(topic_raw, StrToChar(cmd)); cmd = ""; strComplete = false; } >! ```` Тут мы как раз получаем данные из уарт и парсим их, а дальше делай что хочешь -
ой мамочки…. У меня есть немного вопросов касаемо счетчика:
1. тип оборудования Arduino Uno + Mega 2560
2. Скетч Count - на УНО завелся без проблем, показания получаю.
3. Как правильно состыковать УНО и МЕГА, сделано так TX & RX Uno соединены с RX(0) & TX(1) Mega, ни чего нет на Меге.
4. Самое противное, при заливке скетча MQTT на 2560 получаю странную картину - постоянно мигает светодиод L и Мега ни как не реагирует на поступающие данные, и не пингуется по своему адресу. в кодах ни чего не менял кроме ip адресов
Куда рыть далее???
-
по умолчанию считаю что в обоих скетчах - UART уже прописан. или я не прав?
-
Пардон, не UNO а NANO
-
и еще в Count и MQTT есть такие строки
Count
#define PWR_CTRL A0
MQTT
#define PWR_CTRL A2 //Контроль напряжения
прошу пояснить их назначение и схемку подключения
-
ой мамочки…. У меня есть немного вопросов касаемо счетчика:
1. тип оборудования Arduino Uno + Mega 2560
2. Скетч Count - на УНО завелся без проблем, показания получаю.
3. Как правильно состыковать УНО и МЕГА, сделано так TX & RX Uno соединены с RX(0) & TX(1) Mega, ни чего нет на Меге.
4. Самое противное, при заливке скетча MQTT на 2560 получаю странную картину - постоянно мигает светодиод L и Мега ни как не реагирует на поступающие данные, и не пингуется по своему адресу. в кодах ни чего не менял кроме ip адресов
Куда рыть далее??? ` убери из кода ватчдог либо залей оптибут в мегу.
-
и еще в Count и MQTT есть такие строки
Count
#define PWR_CTRL A0
MQTT
#define PWR_CTRL A2 //Контроль напряжения
прошу пояснить их назначение и схемку подключения ` контроль питания на порту. При пропадании питания сохраняются данные в епром
-
Вачдог…
Это
void reboot() {
save();
delay(500);
wdt_enable(WDTO_1S);
for (;;) {}
}
-
для контроля питания, что то подавать надо, или это аппаратно решено??
-
Сразу скажу, не селен я в программировании, все что делаю сам для ардуины - это просто результат ДООЛГОГО разбирательства чужих кодов, делаю на уровне подсознания…..
-
Вачдог…
Это
void reboot() { save(); delay(500); wdt_enable(WDTO_1S); for (;;) {} } ```` `Тут тоже. В начале кода еще ищи команду wdt_enable.
Либо прошей загрузчик https://github.com/instalator/optiboot, в котором исправлен баг с ватчдогом.
{kind=link}
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
482
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge