

Homeduino an Iobroker anbinden
-
Hi Thorsten,
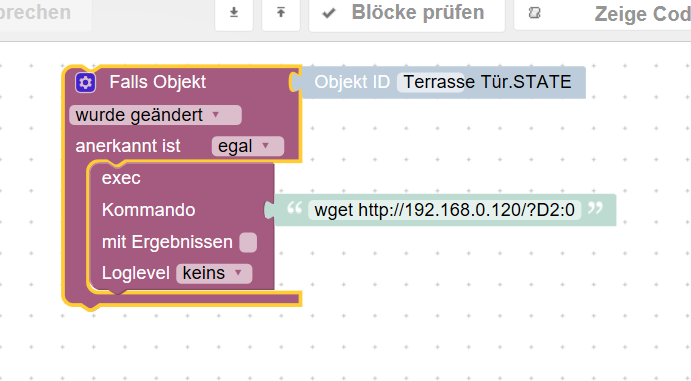
Also das Beispiel mit exec ist für n Javascript gedacht.
Also im iobroker javascript Adapter.
Das kannst du dann zum Beispiel mit dem Taster triggern.
Ich steuere damit zum Beispiel meine Gartenbeleuchtung
Gruß Johnny
-
Danke
über den Browser geht es schon mal
jetzt muss ich mir nur noch überlegen wie ich die Ausgänge potentialfrei bekomme :?: :?: :?: :?:
Wenn aus, dann habe ich 4VDC gegen gnd. Daraus macht mein DuoFern Installationssender ein 1 Signal.
Hätte auch einfach sein können
-
Das freut mich das es geklappt hat!
Potenzialfrei hab ich auch verbaut. Ich hab da einfach n passendes Relais - shield verbaut. War die schnellste und einfachste Lösung!
Gruß Johnny
-
Das freut mich das es geklappt hat!
Potenzialfrei hab ich auch verbaut. Ich hab da einfach n passendes Relais - shield verbaut. War die schnellste und einfachste Lösung!
Gruß Johnny `
Hab da auch noch ne 8er Relais Karte am Start. Berichte weiterVG Torsten
-
Wenn de hilfe brauchst, meld dich einfach!
Bei mir verrichtet der Homeduino seit 2 Jahren gute Dienste und ich würde ihn nicht mehr hergeben wollen!
Nochmal tausend Dank an Eugen.
Damit bin ich richtiger arduino Liebhaber geworden. Hab mir mittlerweile eine eigene Wetterstation auf Basis von arduino gebaut.

Gruß Johnny
-
Da passt irgendwas nicht …
Sende ich zum Beispiel D2:0 - egal ob Browser oder hier:
schalten mehrere IOs mit, also beispielsweise 2 plus 5 und 7?????????
Sketch:
`const String Version = "hduino412_LAN"; /*Stand: 2015.09.07 / Verfasser: Eugen Stall erprobt fuer Arduino Mega 2560 mit Arduino 1.6.5r2 hier ist immer die aktuelle Version: http://www.stall.biz/project/homeduino-4-0-das-universelle-mess-und-aktormodul-fuer-die-hausautomation das folgende homeduino-programm sendet messdaten zur iobroker (homeduino als webclient) ... und empfängt ausgabedaten für die homeduino-outputs (homeduino als webserver) _________________ ________________ |port 8181 server|<---------<| client | | | | | | CCU | | Homeduino | | | | | | client|>--------->|server port 80 | |________________| |_______________| /Quellen:Arduino website plus http://arduino.cc/en/Tutorial/WebClient und ... http://tushev.org/articles/arduino/item/52-how-it-works-ds18b20-and-arduino und ... */ //############################################################################################# //############################################################################################# //Auswahl der verwendeten Shields: #define lcd_display //"tft_display" oder "lcd_display" < <user-eingabe<< 0/115/120/"lcd_display"/auch/wenn/kein/display/verwendet/wird/#define/w5100/"cc3000"/wifi-modul/oder/"w5100"/ethernet/shield/<<user-eingabe<</byte/iobroker[]="{" 192,/168,/0,/};/ip/von/iobroker/mac-adresse/dieses/homeduinos/,bei/mehreren/mac-.adresse/ändern!!:/mac[]="{" 0xcc,/0xcc/homeduino[]="{" des/homeduino,wenn/dhcp/versagt/char/ap_ssid[]="ssid" ;/ssid/wlan/in/anführungszeichen/ap_password[]="password" passwort/xyz/ist/indiv./bezeichnung/homeduino,/keine/sonderzeichen,/öäüß.../const/string/homeduino_nummer="001" hm_systemvariable="homeduino_" +/+"_";/#############################################################################################/i/o-kennung:/hier/die/funktion/aller/verwendbaren/io´s/mit/einer/kennziffer/festgelegt/dabei/haben/alle/standardfunktionen/plus/spez./sonderfunktionen/sind:/'0'="andere" nutzg;/'1'="dig_in;" '2'="dig_out;" '3'="1wire" '4'="DHTxx;" '5'="U_Schall" iomodus_d[80]="{" 0,0,/2,/d2/:/std-fkt;/<<user/io-shield20<</d3/d4/d5/d6/d7/d8/d9/20,/d10/'20'="W5100" ss-pin;/1,/d11/d12/d13/d14/tx3/'12'="rfid3;" io-shield-plus<</d15/rx3/d16/tx2/d17/rx2/d18/tx1/'6'="ImpCount;" '21'="CC3000" d19/rx1/d20/sda/'8'="I2C;" d21/scl/d22/d23/d24/d25/d26/d27/d28/d29/0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,/miso/icsp-stecker/mosi/sck/ss/d54/a0/'10'="analog;" '11'="NTC;" '31'="tft;" '30'="lcd;" ser/io-shield-20<</d55/a1/d56/a2/d57/a3/d58/a4/d59/a5/d62/a8/d63/a9/d64/a10/d65/a11/d66/a12/d67/a13/d68/a14/d69/a15/werden/sensoren/am/i2c-eingang/aktiviert/iomodus_baro="0;" iomodus_lux="0;" iomodus_sht="0;" kennwerte/fuer/impulszaehler/volatile/unsigned/long/pulsecounter[6]="{" zaehlerstand/-impulseingang/bei/reset/d21-impulseingang/d20-impulseingang/d19-impulseingang/d18-impulseingang/der/teilerfaktor/für/int/pulsedivider[6]="{1," anzeigetexte/lcd/und/tft/display_message[80]="{" "0","0",/anzeige/"beweg/tuer:",/anzeigetext/port/d02/gart:",/d03/"0","0","0","0","0","0",/ports/belegt/durch/lcd-shield/"0",/w5100-shield,/pin/abbiegen!/"11/status/:",/"12/",/"13/"14/"rfid/tuer/"16/gara/"18/s03/"19/gas/m3/s02/"21/i2c/sda:",/s01/scl:",/s00/"offner/gara",/tuer",/"24/"25/"26/"27/"28/ds20b18:",/"29/t_dht22:",/"0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0","0",/"temp_auss.:",/"temp_innen:",/"57/"58/"59/spg_a5/"62/"63/"64/"65/"66/"67/"68/"abstand/cm:",/folgenden/sind/module/datenpunkten/z.b./i2c-module/"l-druck/mb:",/"l-temp./c/"lux/lx/"uv-index/"74/"75/"76/"77/"78/"79/:"/zugangsberechtigungen/den/rdm6300/rfid-reader/fobs/fob_anzahl="2;" fob[3*fob_anzahl]="{" "2381286","eugen","1",/tueroeffner/"2381287","eugen","1",/unlock_time1="5000;" oeffnungszeit/rfid1/ms/unlock_time2="5000;" rfid2/boolean/oeffner_polarity="1;" normal,/invers/#include/<spi.h="">#include <wire.h>#include <onewire.h>//für Temperatursensoren DS18B20 //http://www.hacktronics.com/code/OneWire.zip #include <newping.h>//für Ultraschallsensoren SR04 //https://arduino-new-ping.googlecode.com/files/NewPing_v1.5.zip #include "DHT.h" //für Temperatursensoren DHT22 //https://github.com/adafruit/DHT-sensor-library/archive/master.zip #include <as_bh1750.h>//für I2C-Luxmeter //https://github.com/hexenmeister/AS_BH1750/archive/master.zip #include <sfe_bmp180.h>//für I2C-Barometer //https://github.com/sparkfun/BMP180_Breakout/archive/master.zip #include <rcswitch.h>// läuft noch nicht! #include <eeprom.h>#include <sht2x.h>//#include <irremote.h>// läuft noch nicht! //der folgende Bereich ist bei verwendung w5100 auszukommentieren //ausblenden mit " #if defined (5100)" funktioniert leider nicht!! /* //Initialisierung des CC3000 Wifi auf dem IO-Shield-Plus #include <sfe_cc3000.h>// fuer cc3000 wifi // http://github.com/sparkfun/SFE_CC3000_Library/archive/master.zip #include <sfe_cc3000_client.h>// Pins #define CC3000_INT 18 // int-Pin mit Wifi Shield ist D3, mit breakout auf IO-Shield-Plus D18 #define CC3000_EN 46 // en-Pin mit Wifi Shield ist D5, mit breakout auf IO-Shield-Plus D46 #define CC3000_CS 53 // cs-Pin mit Wifi Shield ist D10, mit breakout auf IO-Shield-Plus D53 SFE_CC3000 wifi = SFE_CC3000(CC3000_INT, CC3000_EN, CC3000_CS); SFE_CC3000_Client client = SFE_CC3000_Client(wifi); unsigned int ap_security = WLAN_SEC_WPA2; // Security of network unsigned int timeout = 30000; // Milliseconds char server[] = "192,168,178,50"; // Remote host site */ #if defined (w5100) //************************************************************************ //der folgende Bereich ist die Initialisierung des LAN bei Verwendung des LAN-Shields #include <ethernet.h>EthernetClient client; EthernetServer server(80); #endif //************************************************************************************* #if defined(tft_display) //******************************************************************* #include <adafruit_gfx.h>//Quelle: https://github.com/adafruit/Adafruit-GFX-Library #include <adafruit_tftlcd.h>//Quelle: https://github.com/buhosoft/TFTLCD-Library #include <stdint.h>#include "TouchScreen.h" //Quelle: http://www.smokeandwires.co.nz/blog/a-2-4-tft-touchscreen-shield-for-arduino/ #define YP A1 // must be an analog pin, use "An" notation! #define XM A2 // must be an analog pin, use "An" notation! #define YM 7 // can be a digital pin #define XP 6 // can be a digital pin #define MINPRESSURE 10 #define MAXPRESSURE 1000 TouchScreen ts = TouchScreen(XP, YP, XM, YM, 330); #define BLACK 0x0000 #define BLUE 0x001F #define RED 0xF800 #define GREEN 0x07E0 #define CYAN 0x07FF #define MAGENTA 0xF81F #define YELLOW 0xFFE0 #define WHITE 0xFFFF #define LCD_CS A3 // Chip Select goes to Analog 3 #define LCD_CD A2 // Command/Data goes to Analog 2 #define LCD_WR A1 // LCD Write goes to Analog 1 #define LCD_RD A0 // LCD Read goes to Analog 0 #define tft_rotation 3 //3 oder 1 abhägig vom tft-shield typ < <user-eingabe<< 1/2/3/4/#define/lcd_reset/a4/can/alternately/just/connect/to/arduino's/reset/pin/adafruit_tftlcd/tft(lcd_cs,/lcd_cd,/lcd_wr,/lcd_rd,/lcd_reset);/int/touch_y;/const/byte/zeilenzahl="6;" px,py,pz;/boolean/touch,/touch_alt;/unsigned/long/next_touch_time="0;" 2,4''/display/px_a="901," py_a="183;" touch-koordinaten/oben-links/px_b="192," py_b="189;" oben-rechts/px_c="936," py_c="860;" unten-links/schriftgroesse/tft_type/ist/2,4''display/3.95''display/3,95''/p_x,/p_y/;/normierte/aktuelle/touch-koordinaten:/oben/links/0,0/und/unten/rechts/1000,1000/#endif/*************************************************************************************/#if/defined(lcd_display)/*******************************************************************/https:/www.dfrobot.com/wiki/index.php?title="Arduino_LCD_KeyPad_Shield_%28SKU:_DFR0009%29" #include/<liquidcrystal.h="">LiquidCrystal lcd(8, 9, 4, 5, 6, 7); // initialize library with numbers of the interface pins const byte zeilenzahl = 2; #endif //************************************************************************************* int x, x_alt; byte zeile_pointer[6]; String zeile_data[6] = {" "," "," "," "," "," "}; String display_zeile_alt[6],display_zeile[6]; String taster; char zeichen,buffer[50]; boolean fob_da =0; String zeich, fob_hex, fob_dec,Name, lcd_rfid_message, oeffner, Value; unsigned long fob_zahl,time_rfid3 = 0,time_rfid2 = 0; byte zeichen_zahl; //********************************************************************************************* AS_BH1750 sensor; //Initialize BH1750 Luxmeter library float lux; long Lux; int laenge; const float ALTITUDE = 299.0; // eigene seehoehe in metern < <user io-shield-plus<</sfe_bmp180/pressure;/char/status;/double/t,p,p0,/t_sht21,/h_sht21;/boolean/reading="false;" string/command="String(200);" baro_string,barot_string,/lux_string,/shth_string,shtt_string;/*********************************************************************************************/last_digital_value_d[80];/float/last_value_d[80],last_ir_value,last_rf_value;/unsigned/long/next_time[80];/last_baro_value,last_barot_value,last_shth_value,last_shtt_value;/complete_loop="1;" wenn/1,/dann/einmal/komplett/durchlaufen/befehl,sub_command="String(20),parameter" =/string(20),header="String(20);" befehl2,sub_command2="String(20),parameter2" string(20),header2="String(20);" int/param,port_pin;/port_data;/value;/i;/analogwert;/tempntc;/const/b_wert="3950;" aus/dem/datenblatt/des/ntc/<<user-eingabe<</tn="298.15;" 25°celsius/in/°kelvin/rv="10000;" vorwiderstand/rn="10000;" ntc-widerstand/bei/25°c/rt,temp_tur,humidity;/delta_onewire="0.2;" deltas/für/sendeauslösung/delta_dht="0.1;" °c/delta_us="3.0;" cm/delta_analog="2.0;" inkrement/delta_ntc="0.5;" delta_lux="15;" lux/delta_counter="5;" counter/delta_baro="0.5;" mb/delta_barot="0.5;" delta_shth="0.2;" %/delta_shtt="0.1;" duration,/cm;/variable/ultraschallsensor/time_sr04;/next_full_loop="0;" delta_time="3600000;" jede/stunde/werden/alle/inputs/aktualisiert/delta_tx="500;" ms,/minimaler/abstand/der/telegramme/an/die/iobroker/next_tx="0," time_wait="0;" rf_key;/rfkey;/rcswitch/myswitch="RCSwitch();" zaehlwert;/last_zaehlwert[6]="{0,0,0,0,0,0};" #############################################################################################/void/setup()/{serial.begin(9600);/wire.begin();/+++++++/einrichtung/interrupts/fuer/impulszahler/d2,d3,d18,d19,d20,d21/if/((pulsedivider[0]="">0) && (iomodus_D[2] == 6)) {pinMode(2, INPUT_PULLUP); attachInterrupt(0, ISR_0, FALLING);} if ((pulsedivider[1] > 0) && (iomodus_D[3] == 6)) {pinMode(3, INPUT_PULLUP); attachInterrupt(1, ISR_1, FALLING);} if ((pulsedivider[2] > 0) && (iomodus_D[21] == 6)) {pinMode(21, INPUT_PULLUP); attachInterrupt(2, ISR_2, FALLING);} if ((pulsedivider[3] > 0) && (iomodus_D[20] == 6)) {pinMode(20, INPUT_PULLUP); attachInterrupt(3, ISR_3, FALLING);} if ((pulsedivider[4] > 0) && (iomodus_D[19] == 6)) {pinMode(19, INPUT_PULLUP); attachInterrupt(4, ISR_4, FALLING);} #if defined (w5100) //************************************************************************* if ((pulsedivider[5] > 0) && (iomodus_D[18] == 6)) //interrupt reserviert fuer cc3000 {pinMode(18, INPUT_PULLUP); attachInterrupt(5, ISR_5, FALLING);} #endif //************************************************************************************* //+++++++ rfid initialisieren if ((iomodus_D[15] == 12) && (iomodus_D[14] == 12)){Serial3.begin(9600);} if ((iomodus_D[17] == 12) && (iomodus_D[16] == 12)){Serial2.begin(9600);} #if defined (lcd_display) //****************************************************************** //+++++++ lcd initialisieren lcd.begin(16, 2); delay(200); //16 zeichen in 2 zeilen lcd.setCursor(0,0); lcd.print(" Homeduino 4.0 "); #endif //************************************************************************************* #if defined (tft_display) //****************************************************************** //+++++++ tft initialisieren tft.reset(); int identifier = tft.readID(); tft.begin(identifier); Serial.print(" tft identifier:" ); Serial.println(identifier); delay(100); tft.fillScreen(BLACK); tft.setRotation(tft_rotation); if (tft_type ==1) //2,4'' display {tft_print (1," Homeduino",4,YELLOW); tft_print (2," 4.0",4,YELLOW); tft_print (5,"www.stall.biz",4,CYAN); tft.drawRect(0,0, 319, 240, GREEN); } if (tft_type ==2) //3,95'' display {tft_print (1," Homeduino",5,YELLOW); tft_print (2," 4.0",5,YELLOW); tft_print (5," www.stall.biz",5,CYAN); tft.drawRect(5,5, 475, 310, GREEN); } #endif //************************************************************************************* for(int i=0; i<zeilenzahl; i++)/{zeile_pointer[i]="EEPROM.read(i);" anzeige-pointer/aus/eeprom/holen/if/(zeile_pointer[i]="">79) {zeile_pointer[i] = 0;} //wenn eeprom erstes mal benutzt wird } #if defined (w5100) //************************************************************************ //hier folgt die LAN Initialisierung char myIpString[24]; if (Ethernet.begin(mac) == 0) // start the Ethernet connection: {Serial.println("Failed to configure Ethernet using DHCP"); Ethernet.begin(mac, homeduino);} delay(1000);// give the Ethernet shield a second to initialize: Serial.println("connecting..."); // if you get a connection, report back via serial: if (client.connect(iobroker, 8082)) {} else {Serial.println("connection to iobroker failed");} // if you didn't get a connection to the server: client.stop(); IPAddress myIp = Ethernet.localIP(); sprintf(myIpString, "%d.%d.%d.%d", myIp[0], myIp[1], myIp[2], myIp[3]); I = myIpString; befehl = "GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"IP"+"?value="+I; set_sysvar(); server.begin(); #endif //************************************************************************************* #if defined (cc3000) //********************************************************************** // hier folgt die CC3000 Initialisierung ConnectionInfo connection_info; char myIpString[24]; Serial.println("SparkFun CC3000 - WebClient"); if ( wifi.init() ) {Serial.println("init complete");} else {Serial.println("problem with init!");} // Connect using DHCP if (!wifi.connect(ap_ssid, ap_security, ap_password, timeout)) {Serial.println("no connection to AP");} //build IP address if ( !wifi.getConnectionInfo(connection_info) ) {Serial.println("no connection details");} else {sprintf(myIpString, "%d.%d.%d.%d", connection_info.ip_address[0], connection_info.ip_address[1],connection_info.ip_address[2], connection_info.ip_address[3]); I = myIpString; } befehl = "GET /xy.exe?antwort=dom.GetObject('"+hm_systemvariable+"IP"+"').State('" + I + "')"; set_sysvar(); client.stop(); #endif //************************************************************************************* #if defined (lcd_display) //****************************************************************** //bei erfolgreichem einloggen ausgabe ip-adresse lcd.setCursor(0,1); lcd.print(myIpString); delay(3000); #endif //************************************************************************************* #if defined (tft_display) //******************************************************************* //bei erfolgreichem einloggen ausgabe ip-adresse tft.fillScreen(BLACK); if (tft_type ==1) //2,4'' display {tft.setCursor(8, 230); //fusszeile tft.setTextColor(GREEN); tft.setTextSize(1); tft.print(Version + " Homeduino IP: "); tft.print( myIpString); } if (tft_type ==2) //3,95'' display {tft.setCursor(1, 300); //fusszeile tft.setTextColor(GREEN); tft.setTextSize(2); tft.print(Version + " IP: "); tft.print( myIpString); } #endif //************************************************************************************* for (int i = 0; i < 80; i++) {next_Time[i]=0;} // //delay(2000); } //############################################################################################# //############################################################################################# void loop() {complete_loop = 0; if (millis() > next_full_loop) //mindestens jede Stunde eine komplette Aktualisierung {complete_loop = 1; next_full_loop = millis() + delta_time; if (next_full_loop < millis()) {complete_loop = 0;} //wichtig wegen Zahlensprung //von millis() alle 50 Tage } //********************************************************************************************* for (int i = 2; i < 70; i++) //behandlung aller Ports D2 bis D69 {while ((iomodus_D[i] == 0) || (iomodus_D[i] >29 )) {i++;} // unbenutzte pins überspringen datenempfang(); //nach jeder Messung auf Datenempfang schalten display_data(); //display ausgeben und abfragen //******************************************************************************************** if (iomodus_D[i] == 1) //behandlung digitaleingänge {if (millis() > next_Time[i]) {next_Time[i] = next_Time[i] +1000; //digitaleingänge nicht häufiger als alle 1000ms abfragen pinMode(i, INPUT_PULLUP); digitalWrite(i, HIGH); value =digitalRead(i); for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {if (value ==0) {zeile_data[m] = "LOW";} else {zeile_data[m] = "HIGH";}}} if ((!value == last_digital_value_D[i]) || complete_loop) {I = String(i); befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"D"+I+"?value="+value; set_sysvar(); last_digital_value_D[i] = value; } } } //********************************************************************************************* if (iomodus_D[i] == 3) //behandlung onewire {if (millis() > next_Time[i]) {next_Time[i] = next_Time[i] +10000; //onewire nicht häufiger als alle 10s abfragen pinMode(i, INPUT_PULLUP); digitalWrite(i,HIGH); OneWire ds(i); #define DS18S20_ID 0x10 #define DS18B20_ID 0x28 byte present = 0; byte data[12]; byte addr[8]; temp_tur = 1000.0; if (!ds.search(addr)) { ds.reset_search(); temp_tur = -1000.0; } //find a device if ((OneWire::crc8( addr, 7) != addr[7]) && (temp_tur > -1000.0)) {temp_tur = -1000.0; } if ((addr[0] != DS18S20_ID && addr[0] != DS18B20_ID)&& (temp_tur > -1000.0)) {temp_tur = -1000.0;} if (temp_tur > -1000.0) {ds.reset(); ds.select(addr); ds.write(0x44, 1); // Start conversion //delay(850); // Wait some time... time_wait = millis() +850; //wahrend der 2s wartezeit, daten empfangen while (millis() < time_wait) {datenempfang();display_data;} //und display weiter bedienen present = ds.reset(); ds.select(addr); ds.write(0xBE); // Issue Read scratchpad command for ( int k = 0; k < 9; k++) { data[k] = ds.read(); } // Receive 9 bytes temp_tur = ( (data[1] << 8) + data[0] )*0.0625; // Calculate temperature value 18B20 //temp_tur = ( (data[1] << 8) + data[0] )*0.5 // Calculate temperature value 18S20 } for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {zeile_data[m] = String(temp_tur,1);} } if ((temp_tur > (last_value_D[i] + delta_onewire)) || (temp_tur < (last_value_D[i] - delta_onewire)) || complete_loop) {I = String(i); befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"D"+I+"?value="+temp_tur; set_sysvar(); last_value_D[i] = temp_tur; } } } //********************************************************************************************* if (iomodus_D[i] == 4) //behandlung DHT temperatur- und feuchtesensoren {if (millis() > next_Time[i]) {next_Time[i] = next_Time[i] +30000; //DHT nicht häufiger als alle 30s abfragen DHT dht(i, DHT22); //je nach verwendetem sensor "DHT11", "DHT22" (AM2302),"DHT 21" (AM2301) dht.begin(); //delay(2000); // Sensor readings may also be up to 2 seconds 'old' (its a very slow sensor) time_wait = millis() +2000; //wahrend der 2s wartezeit, daten empfangen while (millis() < time_wait) {datenempfang();display_data;} //und display weiter bedienen humidity = dht.readHumidity(); // Read temperature as Celsius temp_tur = dht.readTemperature(); if (isnan(humidity) || isnan(temp_tur) ) // Check if any reads failed and {//Serial.println("Failed to read from DHT sensor!"); temp_tur = -1000; } for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {zeile_data[m] = String(temp_tur,1);} } if ((temp_tur > (last_value_D[i] + delta_DHT))|| (temp_tur < (last_value_D[i] - delta_DHT)) || complete_loop) {I = String(i); befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"D"+I+"?value="+temp_tur; set_sysvar(); befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"D"+I+"_1"+"?value="+humidity; set_sysvar(); last_value_D[i] = temp_tur; } } } //******************************************************************************************** if (iomodus_D[i] == 5) //behandlung ultraschallsensoren {if (millis() > next_Time[i]) {next_Time[i] = next_Time[i] +2000; //ultraschall nicht häufiger als alle 2s abfragen //achtung: zu beachten //bei verwendung der US-Sensoren beim IO-Shield-Plus sind die 150-Ohm-Schutzwiderstände //zu überbrücken (Jumper setzen!), entsprechend beim IO-Shield20 der Jumper 4-5 zu setzen!! NewPing sonar(i, i, 200); // NewPing setup of pin and maximum distance. unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS). int cm = uS / US_ROUNDTRIP_CM; for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {zeile_data[m] = String(cm);}} if ((cm > (last_value_D[i] + delta_us)) || (cm < (last_value_D[i] - delta_us)) || complete_loop) {I = String(i); befehl = "GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"D"+I+"?value="+cm; set_sysvar(); last_value_D[i] = cm; } } } //********************************************************************************************* if (iomodus_D[i] == 10) //behandlung analogeingänge {if (millis() > next_Time[i]) {next_Time[i] = next_Time[i] +1000; //analogeingänge nicht häufiger als alle 1000ms abfragen analogwert =analogRead(i); for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {zeile_data[m] = String(analogwert);}} if ((analogwert > (last_value_D[i] + delta_analog)) || (analogwert < (last_value_D[i] - delta_analog)) || complete_loop) {I = String(i); befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"D"+I+"?value="+analogwert; set_sysvar(); last_value_D[i] = analogwert; } } } //********************************************************************************************* if (iomodus_D[i] == 11) //behandlung NTC {if (millis() > next_Time[i]) {next_Time[i] = next_Time[i] +10000; //NTC-eingänge nicht häufiger als alle 10s abfragen Rt = Rv/((1024.0/analogRead(i))- 1.0); tempNTC = (B_wert * Tn / ( B_wert + (Tn * log(Rt/Rn)))) -Tn +25.0 ; for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {zeile_data[m] = String(tempNTC,1);}} if ((tempNTC > (last_value_D[i] + delta_ntc)) || (tempNTC < (last_value_D[i] - delta_ntc)) || complete_loop) {I = String(i); befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"D"+I+"?value="+tempNTC; set_sysvar(); last_value_D[i] = tempNTC; } } } //********************************************************************************************* if (iomodus_D[i] == 6) //behandlung impulszahler D2,D3,D21,D20,D19,D18 {byte offset =23; if (i ==2) {offset = 4;} if (i ==3) {offset = 6;} zaehlwert = pulsecounter[offset - i ] / pulsedivider[offset - i ]; for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {zeile_data[m] = String(zaehlwert);}} if ((pulsedivider[offset -i] > 0) && ((zaehlwert > (last_zaehlwert[offset - i]+ delta_counter) || complete_loop))) {I = String(offset -i); befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"imp"+I+"?value="+zaehlwert; set_sysvar(); last_zaehlwert[offset - i] = zaehlwert; } } //********************************************************************************************* //behandlung I2C sensoren an pin 20(sda) und pin 21 (scl) if ((iomodus_D[i] == 8)&&(i == 20)) {i++; // da I2C Bus 2 eingaenge belegt //behandlung Luxmeter BH1750 an SCL pin21 und SDA pin 20 *********************************** // for normal sensor resolution (1 lx resolution, 0-65535 lx, 120ms, no PowerDown) //use: sensor.begin(RESOLUTION_NORMAL, false); if (iomodus_lux ==1) {if (millis() > next_Time[72]) {next_Time[72] = next_Time[72] +5000; //luxmeter nicht haeufiger als alle 5s abfragen if(!sensor.begin()) { Serial.println("Sensor not present"); } lux = sensor.readLightLevel(); //delay(1000); Lux = (int)lux; //Serial.print("Helligkeit/lux: "); Serial.print(lux); Serial.println(); lux_string = " " + String(Lux); int laenge = lux_string.length(); lux_string = lux_string.substring(laenge -6,laenge); for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == 72) {zeile_data[m] = lux_string;}} if (((Lux > (last_value_D[72] + delta_lux)) || (Lux < (last_value_D[72] - delta_lux)) || complete_loop)) {befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"lux"+"?value="+Lux; set_sysvar(); last_value_D[72] = Lux; } } } //behandlung barometer BMP180 an SCL pin21 und SDA pin 20 if (iomodus_baro ==1) {if (millis() > next_Time[70]) {next_Time[70] = next_Time[70] +30000; //barometer nicht häufiger als alle 30s abfragen if (pressure.begin()) {status = pressure.startTemperature();} if (status) {delay(status); status = pressure.getTemperature(T);} //messung T if (status) {status = pressure.startPressure(3);} // //messung P mit resolution 0 bis 3 if (status) {delay(status); status = pressure.getPressure(P,T);} if (status) {p0 = pressure.sealevel(P,ALTITUDE);} // umrechnung auf N.N. //Serial.print("Hoehe/m: "); Serial.print(ALTITUDE); Serial.print(" Temperatur/C: "); //Serial.print(T); Serial.print(" Normaldruck /mb: "); Serial.println(p0); baro_string = " " + String(p0); laenge = baro_string.length(); baro_string = baro_string.substring(laenge -7,laenge -1); baroT_string = " " + String(T); laenge = baroT_string.length(); baroT_string = baroT_string.substring(laenge -7,laenge -1); for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == 70) {zeile_data[m] = baro_string;}} if ((p0 > (last_baro_value + delta_baro)) || (p0 < (last_baro_value - delta_baro)) || complete_loop) {befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"baro"+"?value="+p0; set_sysvar(); last_baro_value = p0; last_value_D[70] = p0; } for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == 71) {zeile_data[m] = baroT_string;}} if ((T > (last_baroT_value + delta_baroT)) || (p0 < (last_baroT_value - delta_baroT)) || complete_loop) {befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"baroT"+"?value="+T; set_sysvar(); last_baroT_value = T; last_value_D[71] = T; } } } //*********************************************************************** //behandlung SHT21 an SCL pin21 und SDA pin 20 //behandlung Temperatur- und Feuchtesensor an SCL pin21 und SDA pin 20 if (iomodus_sht ==1) {if (millis() > next_Time[73]) {next_Time[73] = next_Time[73] +15000; //SHT nicht häufiger als alle 10s abfragen h_sht21 = ( SHT2x.GetHumidity() ) ; // ggf ( ) nicht setzten. t_sht21 = ( SHT2x.GetTemperature() ) ; // ggf ( ) nicht setzten. shtH_string = " " + String(h_sht21); laenge = shtH_string.length(); shtH_string = shtH_string.substring(laenge -7,laenge -1); shtT_string = " " + String(t_sht21); laenge = shtT_string.length(); shtT_string = shtT_string.substring(laenge -7,laenge -1); for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == 73) {zeile_data[m] = shtH_string;}} if ((h_sht21 > (last_shtH_value + delta_shtH)) || (h_sht21 < (last_shtH_value - delta_shtH)) || complete_loop) {befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"SHT-Feuchte"+"?value="+h_sht21; set_sysvar(); last_shtH_value = h_sht21; last_value_D[73] = h_sht21; } for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == 74) {zeile_data[m] = shtT_string;}} if ((t_sht21 > (last_shtT_value + delta_shtT)) || (t_sht21 < (last_shtT_value - delta_shtT)) || complete_loop) {befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"SHT-Temp"+"?value="+t_sht21; set_sysvar(); last_shtT_value = t_sht21; last_value_D[74] = t_sht21; } } } } //********************************************************************************************* if (iomodus_D[3] == 7) //behandlung 433Mhz-rx {if (mySwitch.available()) {int value = mySwitch.getReceivedValue(); if (value == 0) {client.print("Unknown encoding");} else {Serial.print("Pin D3 received : "); Serial.print (mySwitch.getReceivedValue() ); Serial.print (" / "); Serial.print( mySwitch.getReceivedBitlength() ); Serial.print("bit Protocol: "); Serial.println( mySwitch.getReceivedProtocol() + " \n\r" ); } mySwitch.resetAvailable(); } } //******************************************************************************************* if ((iomodus_D[i] == 12) && (i==22)) //behandlung rfid3 tueroeffner an D22 des Mega {pinMode(i,OUTPUT); if (millis()< time_rfid3) //D22-als normal-Ausgang für tueröffner schalten {Value = " AUF"; if (oeffner_polarity) {digitalWrite(i, HIGH);} else {digitalWrite(i,LOW);} } else {Value = " ZU"; if (!oeffner_polarity) {digitalWrite(i, HIGH);} else {digitalWrite(i,LOW);}} for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {zeile_data[m] = Value;}} } if ((iomodus_D[i] == 12) && (i==23)) //behandlung rfid2 tueroeffner an D23 des Mega {pinMode(i,OUTPUT); if (millis()< time_rfid2) //D23-als normal-Ausgang für tueröffner schalten {Value = " AUF"; if (oeffner_polarity) {digitalWrite(i, HIGH);} else {digitalWrite(i,LOW);}} else {Value = " ZU"; if (!oeffner_polarity) {digitalWrite(i, HIGH);} else {digitalWrite(i,LOW);}} for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == i) {zeile_data[m] = Value;} } } //******************************************************************************************** if (iomodus_D[i] == 12) //behandlung rfid-modul RDM6300 {int m = 0; fob_zahl=0; fob_hex =""; if (i == 15){while((Serial3.available()>0)&&(m <11 )) //behandlung rfid3 {fob_da=1; m++; zeichen = Serial3.read(); if (m>4) //die ersten 4 zeichen ignorieren {fob_hex += zeichen; fob_zahl = hexToDec(fob_hex);} if (m > 10) //Datenübertragung fertig, dann buffer leeren {while(Serial3.available()>0) {zeichen = Serial3.read();}} } } if (i == 17){while((Serial2.available()>0)&&(m <11 ))//behandlung rfid2 {fob_da=1; m++; zeichen = Serial2.read(); if (m>4) //die ersten 4 zeichen ignorieren {fob_hex += zeichen; fob_zahl = hexToDec(fob_hex);} if (m > 10) //Datenübertragung fertig, dann buffer leeren {while(Serial2.available()>0) {zeichen = Serial2.read();}} } } if (fob_da) {fob_dec = ""; sprintf(buffer,"%lu", fob_zahl); //zahl umwandeln in string for(int k = 0; k<7; k++) {fob_dec += buffer[k];} Name = ""; //gueltigen namen und oeffner aus tabelle ermitteln for (int k = 0; k < fob_anzahl; k++) {if (fob_dec == fob[3*k]) {Name += fob[(3*k)+1]; oeffner= fob[(3*k)+2]; break; } } if ((Name != "") && ((oeffner =="1") ||(oeffner =="3"))) {time_rfid3 = millis() + unlock_time1;} if ((Name != "") && ((oeffner =="2") ||(oeffner =="3"))) {time_rfid2 = millis() + unlock_time2;} if (Name == "") {Name = fob_dec;} lcd_rfid_message = Name + " "; //lcd mmeldung modifizieren für rfid lcd_rfid_message = lcd_rfid_message.substring(0,9); for (int n=0; n < zeilenzahl; n++) {if (zeile_pointer[n] == i) {display_message[i]= lcd_rfid_message; zeile_data[n] = fob_dec;} } //Serial.println(Name + " " + fob_dec); I = String(i); befehl="GET /set/javascript.0.Technikraum.Homeduino."+hm_systemvariable+"D"+I+"?value="+Name; set_sysvar(); fob_da =0; } delay(500); } //************************** ende loop ***************************************************** } } //############################################################################################# //############################################################################################# //############################# Unterprogramme ############################################# void datenempfang() //Unterprogramm datenempfang: daten von iobroker an homeduino senden {command = ""; #if defined (w5100) //************************************************************************ EthernetClient client = server.available(); //mit W5100 #endif //************************************************************************************* #if defined (cc3000) //*********************************************************************** SFE_CC3000_Client client = SFE_CC3000_Client(wifi); //mit CC3000 #endif //************************************************************************************* if (client) // an http request ends with a blank line {boolean currentLineIsBlank = true; while (client.connected()) {if (client.available()) {char c = client.read(); if (reading && c == ' ') reading =false; if (c == '?') reading = true; // beginn der Befehlssequenz if (reading) {if (command.length() < 100) //read char by char HTTP request {command = command + c; } //store characters to string } if (c == '\n' && currentLineIsBlank) break; if (c == '\n') {currentLineIsBlank = true;} else if (c != '\r') { currentLineIsBlank = false;} } } client.println(command); delay(1); client.stop(); //********************************************************************************************* if (command.length() > 2) //behandlung Datenempfang von iobroker: port auf 0/1 setzen {Serial.println(command); //empfangenen befehl ausgeben client.print(command); //befehl dann dekodieren int colonPosition = command.indexOf(':'); sub_command = command.substring(2,colonPosition); //portpin erkennen Serial.print("D" + sub_command + " :"); port_pin = sub_command.toInt(); command = command.substring((colonPosition+1)); //Rest-command bilden if (((iomodus_D[port_pin] == 2)||(iomodus_D[port_pin] == 12)) && (command == "0")) {for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == port_pin) {zeile_data[m] = " LOW";} } pinMode(port_pin, OUTPUT); digitalWrite(port_pin, LOW); Serial.println(command); } if ((iomodus_D[port_pin] == 2) && (command == "1")) {for (int m=0; m < zeilenzahl; m++) {if (zeile_pointer[m] == port_pin) {zeile_data[m] = " HIGH";} } pinMode(port_pin, OUTPUT); digitalWrite(port_pin, HIGH); Serial.println(command);} if ((iomodus_D[port_pin] == 7) && (port_pin ==4)) {rf_send(command); Serial.println(command);} if ((iomodus_D[port_pin] == 5) && (port_pin ==9)) {ir_send(command); Serial.println(command);} } } } //********************************************************************************************* void set_sysvar() // subroutine HTTP request an ioBroker absetzen: {//while (millis() < next_tx) {} //warten bis time > next_tx oder timeout next_tx = millis() +delta_tx; if (client.connect(iobroker, 8082)) {Serial.println(befehl); client.println(befehl); client.println(); client.stop(); } else {Serial.println("connection to iobroker failed");} } //********************************************************************************************* void rf_send(String rf_command) // subroutine rf telegramm senden { } //********************************************************************************************* void ir_send(String ir_command) // subroutine ir telegramm senden { } //********************************************************************************************* //hier sind die interrupt-service-routinen fuer die impulszaehler //************************** void ISR_0() //Interrupt an D2 {pulsecounter[0]++;} void ISR_1() //Interrupt an D3 {pulsecounter[1]++;} void ISR_2() //Interrupt an D21 {pulsecounter[2]++;} void ISR_3() //Interrupt an D20 {pulsecounter[3]++;} void ISR_4() //Interrupt an D19 {pulsecounter[4]++;} void ISR_5() //Interrupt an D18 {pulsecounter[5]++;} //********************************************************************************************* //Unterprogramm: Converting from Hex (unsigned long) to Decimal: ***************************** //Quelle https://github.com/benrugg/Arduino-Hex-Decimal-Conversion/blob/master/hex_dec.ino unsigned long hexToDec(String hexString) {unsigned long decValue = 0; int nextInt; for (int k = 0; k < hexString.length(); k++) {nextInt = int(hexString.charAt(k)); if (nextInt >= 48 && nextInt <= 57) nextInt = map(nextInt, 48, 57, 0, 9); if (nextInt >= 65 && nextInt <= 70) nextInt = map(nextInt, 65, 70, 10, 15); if (nextInt >= 97 && nextInt <= 102) nextInt = map(nextInt, 97, 102, 10, 15); nextInt = constrain(nextInt, 0, 15); decValue = (decValue * 16) + nextInt; } return decValue; } //********************************************************************************************* void display_data() //gibt daten auf dem lcd oder tft display aus //********************************************************************************************* #if defined (lcd_display) //behandlung lcd-display: erkennung des tasters und lcd-anzeige {x = analogRead (0); //abfrage A0 if (x < (x_alt -100)) {tastererkennung();} x_alt = x; for (int m = 0; m < zeilenzahl; m++) {while (zeile_data[m].length() < 5) {zeile_data[m] = " " + zeile_data[m];} if (display_message[zeile_pointer[m]] == "0") {zeile_data[m] = " ";} display_zeile[m] = display_message[zeile_pointer[m]] + zeile_data[m]; if (display_zeile[m] != display_zeile_alt[m]) //datenausgabe auf display nur wenn aenderung {lcd.setCursor(0,m); lcd.print (display_zeile[m]); display_zeile_alt[m] = display_zeile[m];} } } //********************************************************************************************* void tastererkennung() {if (x < 60) {taster == "right"; zeile_pointer[0]--; if (zeile_pointer[0] ==1) {zeile_pointer[0] = 79;} while((iomodus_D[zeile_pointer[0]] ==0) || (iomodus_D[zeile_pointer[0]] >19)) {zeile_pointer[0]--; if (zeile_pointer[0] ==1) {zeile_pointer[0] =79;} } EEPROM.write(0,zeile_pointer[0]);//delay(4); } else if (x < 200) {taster == "up"; zeile_pointer[0]++; if (zeile_pointer[0] ==80) {zeile_pointer[0] = 2;} while((iomodus_D[zeile_pointer[0]] ==0) || (iomodus_D[zeile_pointer[0]] >19)) {zeile_pointer[0]++; if (zeile_pointer[0] ==80) {zeile_pointer[0] = 2;} } EEPROM.write(0,zeile_pointer[0]);//delay(4); } else if (x < 400) {taster == "down"; zeile_pointer[1]++; if (zeile_pointer[1] ==80) {zeile_pointer[1] = 2;} while((iomodus_D[zeile_pointer[1]] ==0) || (iomodus_D[zeile_pointer[1]] >19)) {zeile_pointer[1]++; if (zeile_pointer[1] ==80) {zeile_pointer[1] = 2;} } EEPROM.write(1,zeile_pointer[1]);//delay(4); } else if (x < 600) {taster == "left"; zeile_pointer[1]--; if (zeile_pointer[1] ==1) {zeile_pointer[1] = 79;} while((iomodus_D[zeile_pointer[1]] ==0) || (iomodus_D[zeile_pointer[1]] >19)) {zeile_pointer[1]--; if (zeile_pointer[1] ==1) {zeile_pointer[1] =79;} } EEPROM.write(1,zeile_pointer[1]);//delay(4); } else if (x < 800) {taster = "select";} else {taster ="";} } #endif //************************************************************************************* //********************************************************************************************* #if defined (tft_display) //behandlung tft toucheingabe und display 2.4'' {if (millis() > next_touch_time) //touch-display abfragen {TSPoint p = ts.getPoint();// a point object holds x y and z coordinates px = p.x; py = p.y; pz =p.z; pinMode(XM, OUTPUT); pinMode(YP, OUTPUT); if (pz > MINPRESSURE && pz < MAXPRESSURE ) {Serial.print("px : ");Serial.print( px); Serial.print(" py : " ); Serial.print(py); Serial.print(" pz : " ); Serial.print(pz); if (abs(px_B - px_A) > 100) {p_x = (1000 *(px- px_A))/(px_B -px_A); p_y = (1000 *(py - py_A))/(py_C -py_A);} else {p_x = (1000 *(py -py_A))/(py_B - py_A); p_y = (1000 *(px - px_A)) /(px_C - px_A);} Serial.print(" p_x : ");Serial.print( p_x); Serial.print(" p_y : " ); Serial.print(p_y); if (p_y < 154) {touch_y = 0;} //p_y = 1000 entspricht 6,5 Zeilen else {if (p_y < 308) {touch_y = 1;} else {if (p_y < 462) {touch_y = 2;} else {if (p_y < 616) {touch_y = 3;} else {if (p_y < 770) {touch_y = 4;} else {touch_y = 5;}}}}} Serial.print(" touch_y "); Serial.print(touch_y); Serial.println(); if (p_x < 500) {zeile_pointer_minus();} //Serial.println(zeile_pointer[touch_y]);} if (p_x > 500) {zeile_pointer_plus(); } //Serial.println(zeile_pointer[touch_y]);} touch_alt = touch; } for (int m = 0; m < zeilenzahl; m++) //datenausgabe auf tft-display {while (zeile_data[m].length() < 7) {zeile_data[m] = " " + zeile_data[m];} display_zeile[m] = display_message[zeile_pointer[m]] + zeile_data[m]; if (display_zeile[m] != display_zeile_alt[m]) //displayausgabe nur wenn aenderung {tft_print (m,display_zeile[m],schriftgroesse,WHITE); display_zeile_alt[m] = display_zeile[m];} } } } //********************************************************************************************* //mit diesem Unterprogramm wird auf dem tft display ein zeilen-display 6 x 16 emuliert void tft_print (int line, String textline, int font_size, long int color) {if (tft_type ==1) {tft.fillRect(0,38*line, 319, 38, BLACK); //x0,y0, width,heights //zeile loeschen tft.setCursor(0, 38*line+6); //und dann erst schreiben } if (tft_type ==2) {tft.fillRect(0,50*line, 479, 50, BLACK); //x0,y0, width,heights //zeile loeschen tft.setCursor(5, 50*line+6); //und dann erst schreiben } tft.setTextColor(color); tft.setTextSize(font_size); tft.print(textline); } //mit diesen Unterprogrammen wird der zeile_pointer im eeprom abgelegt void zeile_pointer_plus() {next_touch_time = millis() + 200; zeile_pointer[touch_y]++; if (zeile_pointer[touch_y] >79) {zeile_pointer[touch_y] = 2;} while((iomodus_D[zeile_pointer[touch_y]] ==0) || (iomodus_D[zeile_pointer[touch_y]] >19)) {zeile_pointer[touch_y]++; if (zeile_pointer[touch_y] >79) {zeile_pointer[touch_y] = 2;} } EEPROM.write(touch_y,zeile_pointer[touch_y]);//delay(4); } void zeile_pointer_minus() {next_touch_time = millis() + 200; zeile_pointer[touch_y]--; if (zeile_pointer[touch_y] <2) {zeile_pointer[touch_y] = 79;} while((iomodus_D[zeile_pointer[touch_y]] ==0) || (iomodus_D[zeile_pointer[touch_y]] >19)) {zeile_pointer[touch_y]--; if (zeile_pointer[touch_y] <2) {zeile_pointer[touch_y] =79;} } EEPROM.write(touch_y,zeile_pointer[touch_y]);//delay(4); } #endif //*************************************************************************************</zeilenzahl;></user></user-eingabe<<></stdint.h></adafruit_tftlcd.h></adafruit_gfx.h></ethernet.h></sfe_cc3000_client.h></sfe_cc3000.h></irremote.h></sht2x.h></eeprom.h></rcswitch.h></sfe_bmp180.h></as_bh1750.h></newping.h></onewire.h></wire.h></user-eingabe<<>` Woran könnte es liegen???? VG Torsten[/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i][/i] -
Hi Thorsten, könntest du mal den serial Monitor dranhängen und beobachten was er dir anzeigt wenn du den digital output schaltest?
Und das hier mal posten?
Gruß Johnny
-
Hi, habe das Relaisboard direkt durchverdrahtet. Also Jumper auf 4-5.
Danach alle IOs an, also Relais alle aus.
Nach D2:0 das hier:
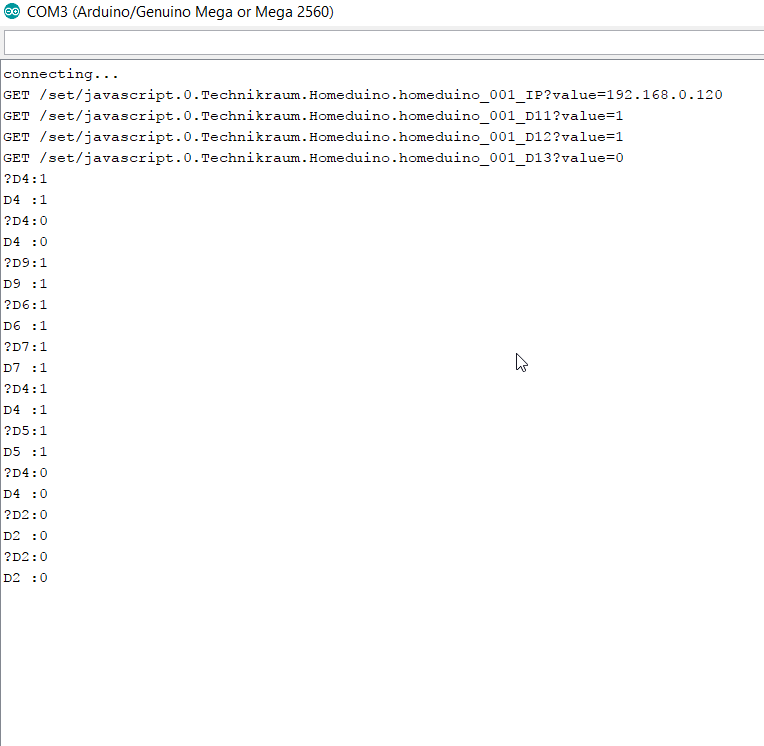
geschaltet haben auch noch 8 und 6 low
nach D2:1
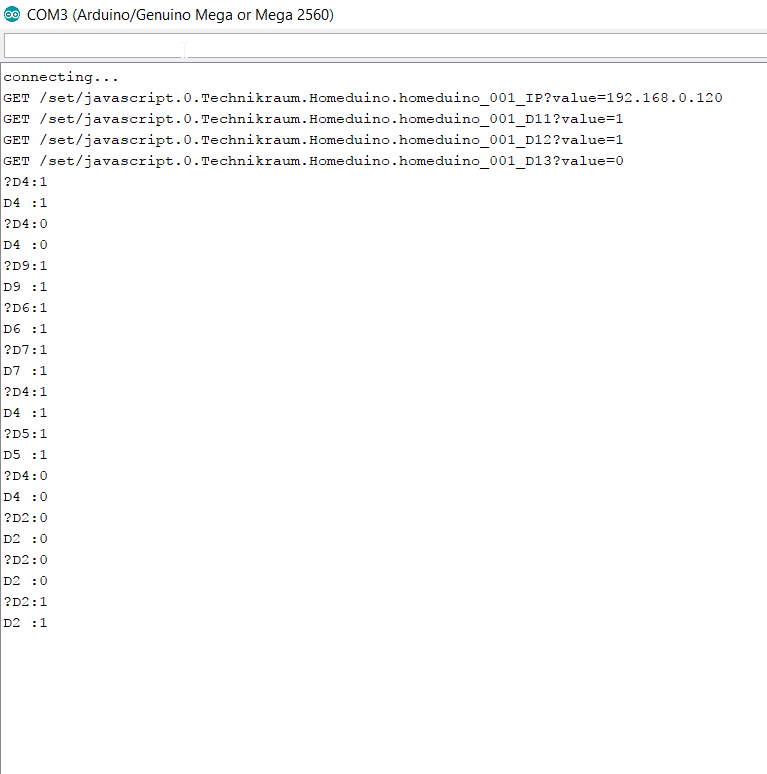
geschaltet haben auch noch 3,4,5 und 9 low
8 und 6 sind wieder high
sehr seltsam…. :?: :?:
-
Ich Kuck mir das später mal genauer an. Hab gerade keine Zeit. Sieht aber eher nach ner Fehlerhaften Verdrahtung aus.
-
:| Habe den Jumper des Relais Board auf VCC-JD, die Ausgänge vom IO20 Board jetzt mal über die MOS-FETs laufen.
Es scheint zu laufen jetzt, auch wenn die LEDs vom Ausgang und den Optokopplern ab und an glimmen.
Zum Schalten aber die Leckspannung nicht reicht.
Tippe auf ein Masseproblem…
Es hat sich aber beruhigt.
Ich hab beides hier im Marktplatz fertig gekauft, kenne also die Vorgeschichte des Homeduino nicht.
Update: Es passt schon wieder nicht mehr. Das Relaisboard funktioniert mit dem RP2 Adapter und einem RP3 tadellos. Die Logik mit Blockly jetzt auch (Danke für die Hilfe!) super.
Jedoch entweder der Funduino oder das IO20 Board hat ne Macke (eben gebraucht :? :? )...
Danke für die Hilfe!!!
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
295
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge