Adapter: Worx Landroid v2.x.x
-
@meistertr
Danke für die Rückmeldung.
War mein Fehler, ich meinte "sendCommand" nicht status.
Also Unterschied zwischen zwischen "Onetimestart" und dem Befehl "Start" unter sendCommand? -
@nik82 ist kein unterschied
-
@meistertr sagte in Adapter: Worx Landroid:
@nik82 ist kein unterschied
Ok, das heißt die Option unter oneTimeWithBorder wirkt sich nicht nur bei oneTimeStart aus, sondern auch auf Start unter sentCommand?
-
@nik82 @meistertr Hier betteln ja einige Aussagen förmlich um Korrektur:
- sendcommand = 1 ("Start"): Hier fährt der Mäher sofort zum Mähen und mäht solange, bis sein Akku unterhalb von 10% kommt. Dann sucht er den Draht und fährt nach Hause. Nah dem Ende des Aufladens fährt er nicht wieder raus zum Mähen. Dieses Kommando kann im Status HOME oder nach einem nicht-manuellen STOP gesendet werden.
- One Time Scheduler: Der One Time Scheduler kann aus dem ioBroker heraus nur im Status HOME aufgerufen werden. Er mäht dann nur eine vorgegebene Zeit lang und tut dies wahlweise mit oder ohne vorhergehenden Kantenschnitt. Nach Ablauf der vorgegebenen Zeit fährt er zur Station zurück, auch wenn sein Akku noch nicht unter 10% ist. Werden die 10% Akkuladung innerhalb der vorgegebenen Zeit erreicht, wird ein "Boxenstopp" zum Aufladen eingelegt. Ist nach dem Aufladen die vorgegebene Zeit noch nicht abgelaufen, so geht's wieder raus zum Mähen.
- Start des One Time Schedulers: Hier gibt es zwei alternative Möglichkeiten:
- Erst oneTimeWorkTime und oneTimeWithBorder füllen und dann oneTimeStart auf true setzen
- Den String für oneTimeJson aufbereiten und setzen
-
Vielen, vielen Dank für die tolle Erklärung.
Dann kann ich es ja doch so einstellen, dass ich "oneTimeWithBorder" immer auf true stehen lasse und dann mit "oneTimeStart" den Mähvorgang mit vorheringen Rasenkantenschnitt starten lasse und ansonsten einfach sendcommand = 1 ("Start") starte.
Super, vielen Dank. -
Hallo,
gibt es ein Objekt wo ich sehen kann das der Landroid "Regen" erkannt hat?
Im Aktivitätenprotokoll steht dann zumindest "Regenverzögerung" drin, kann ich diesen Status mit dem Adapter irgendwo abgreifen?
Habe leider nichts gefunden, evtl. in den Rohdaten irgendwo?Danke im Voraus.
-
@nik82 Der Datenpunkt ist bei Objekte, Mower, Error zu finden.
Gruß
Semmy -
@semmy sagte in Adapter: Worx Landroid:
@nik82 Der Datenpunkt ist bei Objekte, Mower, Error zu finden.
Gruß
SemmyAh, klasse.
Vielen Dank. -
@nik82 Falls Du noch weiter zwischen feuchtem Sensor und der nachfolgenden Verzögerungszeit differenzieren möchtest, dann schau auf
worx.0.9999.rawMqtt.message.dat.rain:- bei Trockenheit:
"rain":{"s":0,"cnt":0} - bei feuchtem Regensensor:
"rain":{"s":1,"cnt":40}(falls z.B. 40 = Regenverzögerung) - Regensensor wieder trocken: "cnt" in
"rain":{"s":1,"cnt":40}wird minutenweise runtergezählt - Regenverzögerung abgelaufen:
"rain":{"s":0,"cnt":0}
Die Regenverzögerungszeit siehst Du in
worx.0.9999.mower.waitRainbzw. inworx.0.9999.rawMqtt.message.cfg.rd. - bei Trockenheit:
-
@hsteinme Hallo. Wie kommt man an die RAW-Daten?
Viele Grüße
Semmy -
hier mal ein beispiel wie sowas aussehen kann...
-
@jens-meyer
Das was ich in dem anderen thread gesagt habe, gilt hier auch.
-> mehr einstellen:
Scipte, blockly, View Seite, etc. -
@bahnuhr
kann man den anderen thread wieder löschen? -
Ein "normaler" User glaub ich nicht.
Admin vielleicht.
Aber lass ihn doch drin. -
@bahnuhr
war ein versehen an dieser stelle...sorry -
@semmy sagte in Adapter: Worx Landroid:
Wie kommt man an die RAW-Daten?
Indem man sich den Objektbaum seines Worx Adapters näher anschaut.
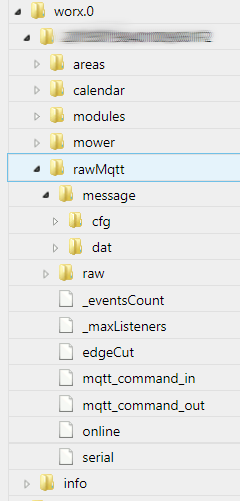
-
@hsteinme Der Ordner rawmqtt fehlt bei mir aber
-
@semmy Dann aktivier mal "add raw data" in den Adapter-Einstellungen.
-
Wo finde ich denn eigentlich eine Liste für "sendCommand"?
-
@hg6806 Markiere die sendCommand-Zeile im Objektbaum des Adapters, klicke ganz rechts auf das Bleistift-Symbol, aktiviere den Reiter RAW (EXPERTS ONLY) und schaue, was unter "states" steht:
"states": { "1": "Start", "2": "Stop", "3": "Home", "4": "Start Zone Taining", "5": "Lock", "6": "Unlock", "7": "Restart Robot", "8": "pause when follow wire", "9": "safe homing" }
